---
title: "Derinlemesine Arama (DFS)"
subtitle: "DFS = özyinelemeli derine in, geri çekil; erişilebilirlik O(E) (ebeveyn ağacı, en kısa değil); full DFS → bağlı bileşenler O(V+E); DAG'da ters bitiş sırası = topolojik sıra (u→v ⇒ f(u)<f(v), benzersiz değil); geri kenar (v → atası) = çevrim; bağımlılık çözen her sistem (make/npm/pip) içten içe bunu çalıştırır"
---
::: {.callout-note title="Bölüm bilgisi"}
- **Solomon'un videosu:** [YouTube — Lecture 10: Depth-First Search](https://www.youtube.com/watch?v=IBfWDYSffUU) (≈52 dk)
- **OCW sayfası:** [MIT 6.006 Lecture 10: Depth-First Search](https://ocw.mit.edu/courses/6-006-introduction-to-algorithms-spring-2020/resources/lecture-10-depth-first-search/)
- **Seri:** MIT 6.006 — Introduction to Algorithms (Spring 2020) — Ders 15 (L10)
- **Hoca:** Justin Solomon (Demaine/Ku değil)
- **Okuma süresi:** ≈25 dk
> Bir önceki ders BFS'i (enine arama) verdi; bu ders onun kardeşi **DFS**'i çözer ve üç güçlü uygulamayı açar: erişilebilirlik, bağlı bileşenler, topolojik sıralama (+ çevrim tespiti).
:::
## Bu Derste Ne Var? {#sec-bu-derste-ne-var-d15}
Ders 13 (L9) BFS'i (enine arama) verdi; Ders 14 (Quiz 1 Gözden Geçirme, Jason Ku) araya girdi. Bugün yine Justin Solomon ile BFS'in kardeşi **DFS (depth-first search, derinlemesine arama)** ile devam ediyoruz. DFS, çizgeyi "olabildiğince derine in, sonra geri çekil" mantığıyla gezer ve üç güçlü uygulamayı açar: **erişilebilirlik**, **bağlı bileşenler**, **topolojik sıralama** (+ çevrim tespiti).
> *"in breadth-first search, we're like, drawing concentric circles. In depth-first search... we're like, shooting outward until we reach the outer boundary."* — Solomon, 6:55
Üç ana fikir bu derste yan yana gelir:
1. **DFS = özyinelemeli gezinme** — bir düğümden komşularına in, her komşu kendi komşularına insin; erişilebilirliği $O(E)$'de çöz.
2. **Bağlı bileşenler** — full DFS (her düğüm üzerinde döngü) ile $O(V + E)$'de tüm "kümeleri" bul.
3. **Topolojik sıralama** — bir DAG'da, DFS bitiş sırasının **tersi** geçerli bir bağımlılık sıralaması verir; aynı teknik **çevrim tespiti** yapar.
```{mermaid}
%%| label: fig-concept-map
%%| echo: false
%%| fig-cap: "Ders 15'in (L10) kavram haritası: kök = derinlemesine arama (DFS). Beş dal — (1) DFS özyinelemeli iskelet: bir düğümden ziyaretsiz komşuya in, dibe vur, geri çekil (özyineleme çözülür). (2) erişilebilirlik O(E): ebeveyn ağacı P(v) ile kaynaktan bir yol — en kısa DEĞİL; DFS yalnız erişilebilir kenarlara dokunur. (3) bağlı bileşenler: full DFS tüm düğümler üzerinde döngü → her ada bir DFS ağacıyla O(V+E)'de bulunur. (4) DAG + topolojik sıra: yönlü çevrimsiz çizgede ters bitiş sırası = topolojik sıralama (u→v ⇒ f(u)<f(v)), benzersiz değil. (5) çevrim tespiti: geri kenar (v'den atasına kenar) bir çevrimi tamamlar; topolojik sıra var ancak ve ancak DAG. Sonuç: tek özyinelemeli iskelet, dört güç."
flowchart TD
A["Ders 15 (L10): Derinlemesine Arama (DFS)"] --> D["DFS özyinelemeli iskelet<br/>derine in, geri çekil"]
D --> D1["ziyaretsiz komşuya in<br/>dibe vur, geri çekil (yığın boşalır)"]
A --> R["erişilebilirlik O(E)<br/>ebeveyn ağacı P(v)"]
R --> R1["kaynaktan bir yol — en KISA değil<br/>yalnız erişilebilir kenarlara dokunur"]
A --> C["bağlı bileşenler<br/>full DFS"]
C --> C1["tüm düğümler üzerinde döngü<br/>her ada bir DFS ağacı, O(V+E)"]
A --> T["DAG + topolojik sıra<br/>ters bitiş sırası"]
T --> T1["u→v ⇒ f(u)<f(v)<br/>benzersiz değil"]
A --> Y["çevrim tespiti<br/>geri kenar"]
Y --> Y1["v'den atasına kenar = çevrim<br/>topolojik sıra var ancak ve ancak DAG"]
classDef root fill:#fef3c7,stroke:#b45309,stroke-width:3px,color:#1f2937
classDef branch fill:#f3f4f6,stroke:#374151,stroke-width:2px,color:#1f2937
classDef leaf fill:#ffffff,stroke:#9ca3af,stroke-width:1px,color:#1f2937
class A root
class D,R,C,T,Y branch
class D1,R1,C1,T1,Y1 leaf
```
::: {.callout-tip title="Builder Notu — Tek İskelet, Dört Güç"}
DFS, "derine in, geri çekil" diyen tek bir özyinelemeli iskelettir — ama o tek iskeletten dört ayrı güç çıkar. Önce nasıl gezdiğini (özyineleme), sonra ne sorabildiğini (erişilebilirlik, bileşenler, sıra, çevrim) sorarız.
- **İleriye → topolojik sıralama her yerde:** `make`, paket yöneticileri (npm/pip bağımlılık çözümü), build sistemleri, görev zamanlayıcılar — hepsi DAG'da topolojik sıralama çalıştırır.
- **İleriye → çevrim tespiti:** deadlock tespiti, döngüsel bağımlılık uyarısı (import cycle), elektronik tablo formül döngüsü.
- **Geriye → BFS (Ders 13):** ikisi de $O(V + E)$ çizge gezme iskeleti; BFS en kısa yol (ağırlıksız) verir, DFS yapısal sorular (DAG mı? bileşenler? sıra?) için.
- **İleriye → Dijkstra (Ders 16-19 (L11-L13)):** DFS/BFS ağırlıksız; ağırlık girince öncelik kuyruğu gelir.
Tek cümle: *DFS, çizgeyi özyinelemeli olarak derinlemesine gezer; bu tek iskeletten erişilebilirlik ($O(E)$), bağlı bileşenler ($O(V + E)$) ve topolojik sıralama/çevrim tespiti çıkar.*
:::
```{python}
#| echo: false
# ============================================================================
# SETUP — 6.006 Ders 15 (L10) DFS motoru (_engine.py D15 bölümü: dfs'ten
# build_dag_example'a) + D13 build_example_graph / bfs / bfs_levels
# (fig-bfs-vs-dfs için) + Slate+Amber viz (_viz.py COL_* + apply_style).
# Bu hücre gizlidir (#| echo: false). Aşağıdaki TÜM figür hücreleri bu hücrede
# tanımlanan dfs / dfs_visit_order / full_dfs / connected_components /
# finishing_order / topological_order / verify_topological / find_cycle /
# build_dfs_example / build_dag_example / build_example_graph / bfs /
# bfs_levels / make_undirected + COL_*'ı IMPORT ETMEDEN kullanır.
#
# Notion'daki öğretim içeriği (görünür ```python blokları) bu motorun tarif
# seviyesidir; burada tam, deterministik, test edilmiş sürüm yaşar.
#
# NOT: matplotlib.use("Agg") ÇAĞRILMAZ — Quarto'nun inline figür-yakalama
# backend'ini ezer (plt.show() 0 figür üretir). Standalone testte savefig
# kullanılır; Quarto render'da jupyter inline backend'i ayarlar.
# ============================================================================
import math
from collections import deque
import matplotlib.pyplot as plt
from matplotlib.patches import Circle, FancyBboxPatch, FancyArrowPatch, Arc, Ellipse
# ---------------------------------------------------------------------------
# _viz.py — Slate+Amber stil sabitleri (HEX birebir) + apply_style
# ---------------------------------------------------------------------------
COL_PRIMARY = "#374151" # slate-700 — birincil çizgi/çerçeve
COL_ACCENT = "#f59e0b" # amber-500 — vurgu
COL_TEXT = "#1f2937" # slate-800 — metin
COL_BG = "#f3f4f6" # slate-100 — arka plan / kutu dolgusu
COL_AMBER_700 = "#b45309" # bağlantı/okunur kontrast
COL_AMBER_600 = "#d97706" # koyu amber
COL_AMBER_300 = "#fcd34d" # açık amber
COL_AMBER_100 = "#fef3c7" # en açık amber (dolgu)
COL_SLATE_500 = "#6b7280" # orta slate — ikincil metin
COL_SLATE_400 = "#9ca3af" # soluk slate — pasif kenar / izgara
COL_WHITE = "#ffffff"
def apply_style(ax):
"""Bir eksene tutarlı Slate+Amber görünümü uygular (curve figürleri için)."""
ax.set_facecolor(COL_WHITE)
ax.grid(True, alpha=0.25, color=COL_SLATE_400, linewidth=0.8)
for spine in ax.spines.values():
spine.set_color(COL_SLATE_400)
ax.tick_params(colors=COL_TEXT)
ax.title.set_color(COL_TEXT)
ax.xaxis.label.set_color(COL_TEXT)
ax.yaxis.label.set_color(COL_TEXT)
return ax
# ---------------------------------------------------------------------------
# _engine.py D13 (L9) — fig-bfs-vs-dfs için gereken BFS yardımcıları.
# adj = dict {düğüm: komşu listesi} (yönlü: yalnız çıkış komşuları).
# ---------------------------------------------------------------------------
def bfs(adj, s):
"""BFS (L9 §8): kaynaktan katman katman; (delta, parent) döndürür. O(V+E)."""
delta = {s: 0}
parent = {s: None}
queue = deque([s])
while queue:
u = queue.popleft()
for v in adj[u]:
if v not in delta: # henüz görülmemiş
delta[v] = delta[u] + 1
parent[v] = u
queue.append(v)
return delta, parent
def bfs_levels(adj, s):
"""Seviye kümeleri (L9 §8): Lₖ = kaynaktan tam k uzaklıktaki düğümler."""
delta, _ = bfs(adj, s)
if not delta:
return []
kmax = max(delta.values())
return [sorted(v for v, d in delta.items() if d == k) for k in range(kmax + 1)]
def make_undirected(edges):
"""Yönsüz kenar listesi → komşuluk sözlüğü (her kenar iki yönde)."""
adj = {}
for u, v in edges:
adj.setdefault(u, []).append(v)
adj.setdefault(v, []).append(u)
for u in adj:
adj[u] = sorted(adj[u]) # deterministik gezinme
return adj
def build_example_graph():
"""L9 figürleri için deterministik yönsüz örnek (7 düğüm, 8 kenar)."""
return make_undirected([("a", "b"), ("a", "c"), ("b", "d"), ("c", "d"),
("c", "e"), ("d", "f"), ("e", "f"), ("f", "g")])
# ---------------------------------------------------------------------------
# _engine.py D15 (L10) — Derinlemesine Arama (DFS) — Solomon
# DFS = özyinelemeli "derine in, geri çekil"; erişilebilirlik O(E)
# (ebeveyn ağacı — en kısa DEĞİL); full DFS → bağlı bileşenler O(V+E);
# DAG'da TERS BİTİŞ SIRASI = topolojik sıra; geri kenar (v → atası) = çevrim.
# ---------------------------------------------------------------------------
def dfs(adj, s, parent=None):
"""DFS (L10 §3): kaynağı işaretle; ziyaretsiz her komşuya in. O(E)."""
if parent is None:
parent = {s: None}
for v in adj[s]:
if v not in parent: # henüz ziyaret edilmemiş
parent[v] = s
dfs(adj, v, parent)
return parent
def dfs_visit_order(adj, s):
"""fig-dfs-run için: ziyaret sırası + geri-çekilme olayları."""
parent = {s: None}
order, events = [], []
def visit(u):
order.append(u)
events.append(("in", u))
for v in adj[u]:
if v not in parent:
parent[v] = u
visit(v)
events.append(("out", u))
visit(s)
return {"order": order, "events": events, "parent": parent}
def full_dfs(adj):
"""Full DFS (L10 §7): tüm düğümler üzerinde döngü → bileşenler. O(V+E)."""
parent, components = {}, []
for s in adj:
if s not in parent:
parent[s] = None
dfs(adj, s, parent)
components.append(s)
return parent, components
def connected_components(adj):
"""Yönsüz çizgede bileşen kümeleri (sıralı listeler — deterministik)."""
seen, comps = set(), []
for s in adj:
if s in seen:
continue
comp = {s}
stack = [s]
while stack:
u = stack.pop()
for v in adj[u]:
if v not in comp:
comp.add(v)
stack.append(v)
seen |= comp
comps.append(sorted(comp))
return comps
def finishing_order(adj):
"""Bitiş sırası (L10 §9): full DFS; visit TAMAMLANINCA ekle."""
parent, order = {}, []
def visit(u):
for v in adj[u]:
if v not in parent:
parent[v] = u
visit(v)
order.append(u) # tüm komşular bitti → bitiş
for s in adj:
if s not in parent:
parent[s] = None
visit(s)
return order
def topological_order(adj):
"""Topolojik sıra (L10 §9): TERS bitiş sırası (DAG'da geçerli)."""
return list(reversed(finishing_order(adj)))
def verify_topological(adj, order):
"""Her u→v kenarı için f(u) < f(v) mi? (L10 §8 tanımı)."""
f = {v: i for i, v in enumerate(order)}
return all(f[u] < f[v] for u in adj for v in adj[u])
def find_cycle(adj):
"""Çevrim bulma (L10 §10): DFS sırasında AKTİF yığındaki bir ataya giden
geri kenar yakalanınca çevrimi döndür; DAG ise None. O(V+E)."""
color = {v: 0 for v in adj} # 0 beyaz, 1 aktif (yığında), 2 bitti
stack = []
def visit(u):
color[u] = 1
stack.append(u)
for v in adj[u]:
if color[v] == 1: # geri kenar → çevrim: v ... u + (u,v)
i = stack.index(v)
return stack[i:] + [v]
if color[v] == 0:
cyc = visit(v)
if cyc is not None:
return cyc
color[u] = 2
stack.pop()
return None
for s in adj:
if color[s] == 0:
cyc = visit(s)
if cyc is not None:
return cyc
return None
def build_dfs_example():
"""L10 §3 çalışılan örneği (Solomon): 1→2; 2→3,5; 3→4.
Ziyaret sırası 1,2,3,4,(geri),5 — seviye sırasını İZLEMEZ."""
return {1: [2], 2: [3, 5], 3: [4], 4: [], 5: []}
def build_dag_example():
"""L10 §8 örneği: A→B, A→C, B→D, C→D — topolojik sıra benzersiz DEĞİL
(hem A,B,C,D hem A,C,B,D geçerli)."""
return {"A": ["B", "C"], "B": ["D"], "C": ["D"], "D": []}
```
## 1. BFS'ten DFS'e: İki Arama Stratejisi {#sec-1-bfsten-dfse}
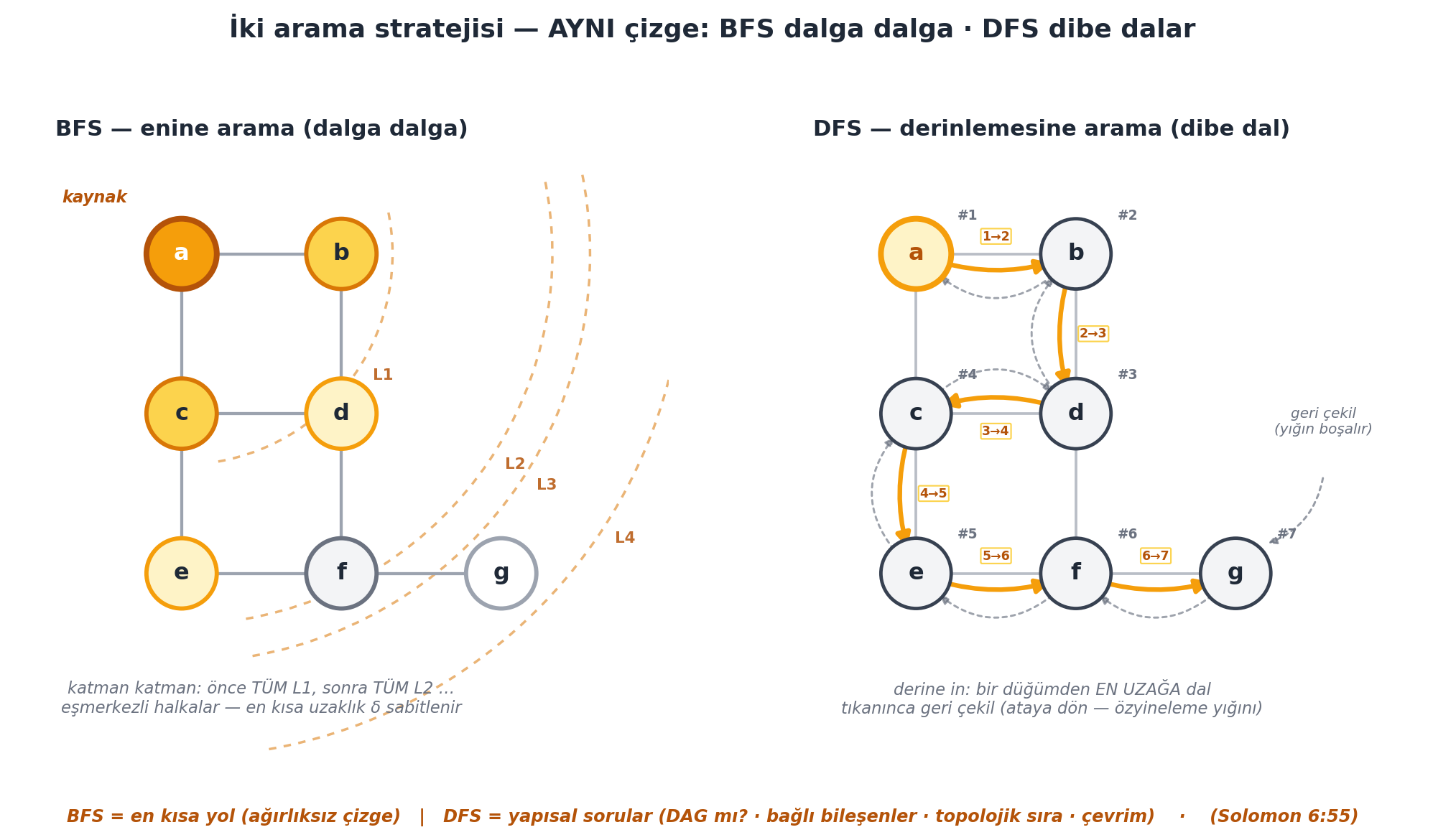
İki temel çizge gezme tekniği vardır. **BFS** kaynaktan dışa **eşmerkezli daireler** çizer: önce $L_1$ (uzaklık 1), tüm $L_1$ bitmeden $L_2$'ye geçilmez. **DFS** ise tam tersi: ilk düğümden başlar, gidebildiği kadar **derine** koşar, tıkanınca **geri çekilir (backtrack)**.
> *"shooting outward until we reach the outer boundary, and then exploring the graph that way."* — Solomon, 6:55
İkisi de aynı çizge terminolojisi üzerine kurulu: $G = (V, E)$, $\text{Adj}^{+}(u)$ çıkış komşuları, yol (path), basit yol (simple path — aynı düğüm iki kez yok). "Doğrusal zaman" çizgede $O(V + E)$ demektir (girdiyi saklamak için gereken yer).
@fig-bfs-vs-dfs aynı 7 düğümlü çizge üzerinde iki stratejiyi yan yana koyar: solda BFS dalga dalga (seviye tonları + eşmerkezli halkalar), sağda DFS tek bir kıvrımlı izle dibe dalar (ziyaret sırası $a \to b \to d \to c \to e \to f \to g$) ve tıkanınca geri çekilir.
```{python}
#| label: fig-bfs-vs-dfs
#| fig-cap: "İki arama stratejisi — AYNI çizge: BFS dalga dalga · DFS dibe dalar (L10 §1, İMZA figür). SOL panel BFS = kaynaktan eşmerkezli halkalar, katman katman (önce TÜM L1={b,c}, sonra TÜM L2={d,e}…); her düğüm seviye tonuyla (L0 a amber kaynak → L4 g beyaz+slate). SAĞ panel DFS = aynı çizge, tek AMBER kıvrımlı ok zinciri dibe dalar (ziyaret sırası a→b→d→c→e→f→g; her ok üstünde sıra numarası); sona varınca geri-çekilme (kesikli gri geri-oklar, özyineleme yığını boşalır). Kontrast: BFS b ve c'yi BİRLİKTE (aynı katman) görür; DFS b'den HEMEN d'ye dalar, c'ye ancak geri çekilince 4. sırada varır. BFS = ağırlıksız en kısa yol; DFS = yapısal sorular (DAG mı? bileşenler? topolojik sıra? çevrim?). Veri MOTORDAN: bfs_levels(build_example_graph(),'a')=[[a],[b,c],[d,e],[f],[g]]; dfs_visit_order(...,'a')['order']=[a,b,d,c,e,f,g] (Solomon 6:55)."
#| fig-width: 11.0
#| fig-height: 6.2
# fig-bfs-vs-dfs (L10 §1 İMZA): BFS dalga dalga vs DFS dibe dalar (AYNI çizge).
# Veri MOTORDAN (build_example_graph / bfs_levels / dfs_visit_order). COL_* / plt
# gizli setup hücresinden. Çizge çizimi networkx KULLANMAZ — elle koordinat.
_BVD_POS = {
"a": (0.0, 2.0), "b": (1.0, 2.0),
"c": (0.0, 1.0), "d": (1.0, 1.0),
"e": (0.0, 0.0), "f": (1.0, 0.0), "g": (2.0, 0.0),
}
_BVD_EDGES = [("a", "b"), ("a", "c"), ("b", "d"), ("c", "d"),
("c", "e"), ("d", "f"), ("e", "f"), ("f", "g")]
_BVD_R = 0.22
_BVD_LEVEL_STYLE = [
(COL_ACCENT, COL_AMBER_700, COL_WHITE), # L0: amber dolgu (kaynak)
(COL_AMBER_300, COL_AMBER_600, COL_TEXT), # L1
(COL_AMBER_100, COL_ACCENT, COL_TEXT), # L2
(COL_BG, COL_SLATE_500, COL_TEXT), # L3
(COL_WHITE, COL_SLATE_400, COL_TEXT), # L4
]
def _bvd_bfs_panel(ax, levels, src):
level_of = {v: k for k, lvl in enumerate(levels) for v in lvl}
sx, sy = _BVD_POS[src]
for k in range(1, len(levels)):
rr = max(math.hypot(_BVD_POS[v][0] - sx, _BVD_POS[v][1] - sy)
for v in levels[k]) + _BVD_R + 0.10
ax.add_patch(Arc((sx, sy), 2 * rr, 2 * rr, theta1=-80, theta2=12,
edgecolor=COL_AMBER_600, linewidth=1.3,
linestyle=(0, (3, 3)), alpha=0.55, zorder=0))
ang = math.radians(-34)
ax.text(sx + rr * math.cos(ang) + 0.10, sy + rr * math.sin(ang) - 0.02,
f"L{k}", ha="left", va="center", fontsize=8,
color=COL_AMBER_700, weight="bold", alpha=0.85, zorder=1)
for u, v in _BVD_EDGES:
x0, y0 = _BVD_POS[u]
x1, y1 = _BVD_POS[v]
ax.plot([x0, x1], [y0, y1], color=COL_SLATE_400, linewidth=1.6,
zorder=2, solid_capstyle="round")
for v, (x, y) in _BVD_POS.items():
fc, ec, tcol = _BVD_LEVEL_STYLE[level_of[v]]
ax.add_patch(Circle((x, y), _BVD_R, facecolor=fc, edgecolor=ec,
linewidth=3.0 if v == src else 2.2, zorder=5))
ax.text(x, y, v, ha="center", va="center", fontsize=12,
color=tcol, weight="bold", zorder=6)
ax.text(sx - _BVD_R - 0.12, sy + _BVD_R + 0.08, "kaynak", ha="right",
va="bottom", fontsize=8.5, color=COL_AMBER_700, weight="bold",
style="italic", zorder=6)
ax.text(0.5, 2.78, "BFS — enine arama (dalga dalga)", ha="center",
va="center", fontsize=11.5, color=COL_TEXT, weight="bold", zorder=6)
ax.text(0.5, -0.78,
"katman katman: önce TÜM L1, sonra TÜM L2 …\n"
"eşmerkezli halkalar — en kısa uzaklık δ sabitlenir",
ha="center", va="center", fontsize=8.5, color=COL_SLATE_500,
style="italic", zorder=6)
ax.set_xlim(-1.05, 3.05)
ax.set_ylim(-1.15, 3.05)
ax.set_aspect("equal")
ax.axis("off")
def _bvd_dfs_panel(ax, order, src):
for u, v in _BVD_EDGES:
x0, y0 = _BVD_POS[u]
x1, y1 = _BVD_POS[v]
ax.plot([x0, x1], [y0, y1], color=COL_SLATE_400, linewidth=1.4,
zorder=1, alpha=0.7, solid_capstyle="round")
for i in range(len(order) - 1):
u, v = order[i], order[i + 1]
x0, y0 = _BVD_POS[u]
x1, y1 = _BVD_POS[v]
adjacent = (u, v) in _BVD_EDGES or (v, u) in _BVD_EDGES
rad = 0.20 if adjacent else 0.42
ax.add_patch(FancyArrowPatch(
(x0, y0), (x1, y1), arrowstyle="-|>", mutation_scale=15,
color=COL_ACCENT, linewidth=2.4, zorder=4, shrinkA=14, shrinkB=14,
connectionstyle=f"arc3,rad={rad}"))
mx = (x0 + x1) / 2 - rad * (y1 - y0) * 0.55
my = (y0 + y1) / 2 + rad * (x1 - x0) * 0.55
ax.text(mx, my, f"{i + 1}→{i + 2}", ha="center", va="center",
fontsize=6.5, color=COL_AMBER_700, weight="bold", zorder=7,
bbox=dict(boxstyle="round,pad=0.10", fc=COL_WHITE,
ec=COL_AMBER_300, lw=0.8))
visit_idx = {v: i + 1 for i, v in enumerate(order)}
for v, (x, y) in _BVD_POS.items():
is_src = (v == src)
ax.add_patch(Circle((x, y), _BVD_R,
facecolor=COL_AMBER_100 if is_src else COL_BG,
edgecolor=COL_ACCENT if is_src else COL_PRIMARY,
linewidth=3.0 if is_src else 1.8, zorder=5))
ax.text(x, y, v, ha="center", va="center", fontsize=12,
color=COL_AMBER_700 if is_src else COL_TEXT, weight="bold", zorder=6)
ax.text(x + _BVD_R + 0.04, y + _BVD_R - 0.02, f"#{visit_idx[v]}",
ha="left", va="bottom", fontsize=7, color=COL_SLATE_500,
weight="bold", zorder=6)
unwind = list(reversed(order))
for i in range(len(unwind) - 1):
u, v = unwind[i], unwind[i + 1]
x0, y0 = _BVD_POS[u]
x1, y1 = _BVD_POS[v]
ax.add_patch(FancyArrowPatch(
(x0, y0), (x1, y1), arrowstyle="-|>", mutation_scale=9,
color=COL_SLATE_500, linewidth=1.1, zorder=3,
linestyle=(0, (2, 2)), alpha=0.65, shrinkA=17, shrinkB=17,
connectionstyle="arc3,rad=-0.55"))
ax.text(2.55, 0.95, "geri çekil\n(yığın boşalır)", ha="center", va="center",
fontsize=7.5, color=COL_SLATE_500, style="italic", zorder=6)
ax.add_patch(FancyArrowPatch(
(2.55, 0.62), (2.18, 0.18), arrowstyle="-|>", mutation_scale=9,
color=COL_SLATE_500, linewidth=1.1, zorder=3, linestyle=(0, (2, 2)),
alpha=0.7, connectionstyle="arc3,rad=-0.3"))
ax.text(0.85, 2.78, "DFS — derinlemesine arama (dibe dal)", ha="center",
va="center", fontsize=11.5, color=COL_TEXT, weight="bold", zorder=6)
ax.text(0.85, -0.78,
"derine in: bir düğümden EN UZAĞA dal\n"
"tıkanınca geri çekil (ataya dön — özyineleme yığını)",
ha="center", va="center", fontsize=8.5, color=COL_SLATE_500,
style="italic", zorder=6)
ax.set_xlim(-1.05, 3.15)
ax.set_ylim(-1.15, 3.05)
ax.set_aspect("equal")
ax.axis("off")
# ---- motor verisi + ASSERT (figür yalnız bunu çizer) ----
_bvd_g = build_example_graph()
_bvd_src = "a"
_bvd_levels = bfs_levels(_bvd_g, _bvd_src)
_bvd_order = dfs_visit_order(_bvd_g, _bvd_src)["order"]
assert _bvd_levels == [["a"], ["b", "c"], ["d", "e"], ["f"], ["g"]], _bvd_levels
assert _bvd_order == ["a", "b", "d", "c", "e", "f", "g"], _bvd_order
assert _bvd_levels[1] == ["b", "c"] # BFS: b,c aynı katman
assert _bvd_order[1] == "b" and _bvd_order[2] == "d" # DFS: b'den hemen d'ye
assert _bvd_order[3] == "c" # c'ye 4. sırada varır
fig, (axL, axR) = plt.subplots(1, 2, figsize=(11.0, 6.2))
fig.patch.set_facecolor(COL_WHITE)
_bvd_bfs_panel(axL, _bvd_levels, _bvd_src)
_bvd_dfs_panel(axR, _bvd_order, _bvd_src)
fig.suptitle(
"İki arama stratejisi — AYNI çizge: BFS dalga dalga · DFS dibe dalar",
color=COL_TEXT, fontsize=13.5, weight="bold", y=0.985)
fig.text(0.5, 0.045,
"BFS = en kısa yol (ağırlıksız çizge) | "
"DFS = yapısal sorular (DAG mı? · bağlı bileşenler · topolojik sıra · çevrim)"
" · (Solomon 6:55)",
ha="center", va="center", fontsize=9, color=COL_AMBER_700,
weight="bold", style="italic")
fig.subplots_adjust(top=0.90, bottom=0.115, left=0.02, right=0.98, wspace=0.04)
plt.show()
```
## 2. Erişilebilirlik Problemi ve Ebeveyn Ağacı {#sec-2-erisilebilirlik-ebeveyn-agaci}
**Erişilebilirlik (reachability):** bir kaynak $s$'den yönlü kenarları izleyerek **hangi düğümlere ulaşılır?**
> *"the reachability problem is just asking, which nodes can I reach from a given source?"* — Solomon, 8:20
BFS ile çözülebilir (erişilemeyen düğümün mesafesi $\infty$), ama daha doğrudan bir yol var. "Kanıt" istersek (sadece "ulaşılır" değil, "nasıl"), her düğümü **öncülü (predecessor)** $P(v)$ ile etiketleriz — kaynaktan o düğüme giden *bir* yolda önceki düğüm. Yolu, $P$'yi geriye izleyip listeyi ters çevirerek kurarız.
Önemli fark (Ders 13'ün en kısa yol ağacından): buradaki **ebeveyn ağacı** en kısa yolu garanti etmez — erişilebilirlikte yolun kısalığı umurumuzda değil, sadece varlığı. Yine de bir ağaçtır (çevrim olamaz).
## 3. DFS Algoritması {#sec-3-dfs-algoritmasi}
DFS özyinelemeli bir `visit` fonksiyonudur: kaynağı işaretle; her komşu $v$ için, **henüz ziyaret edilmemişse** ($P(v) = \text{None}$) ebeveynini "ben" yap ve özyinelemeli olarak ona in.
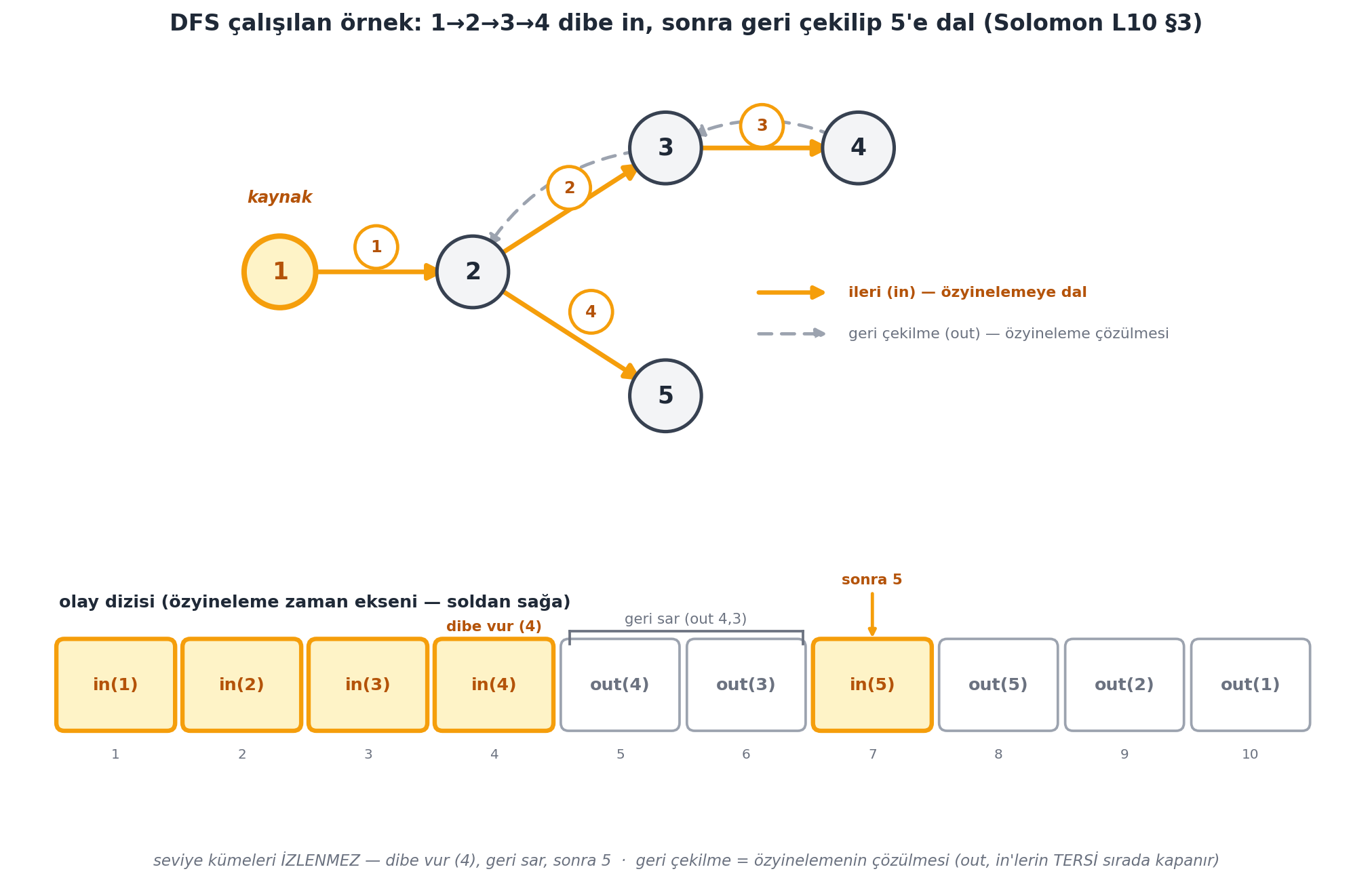
**Çalışılan Örnek — gezinme sırası.** Kaynak 1'den başla. 1'in tek komşusu 2 → visit(2). 2'nin komşuları 3 ve 5; önce 3 → visit(3) → visit(4). Özyineleme dibe vurdu, geri çekil. 2 sonraki komşusu 5'e iner → visit(5). Sıra: $1 \to 2 \to 3 \to 4 \to (\text{geri}) \to 5$. Dikkat: bu **seviye kümelerini izlemez** — DFS dibe (4) gidip sonra 2'ye geri sarıp 5'i çağırdı. "Geri çekilme" = özyinelemenin çözülmesi.
```python
def dfs(adj, s, parent=None):
if parent is None:
parent = {s: None} # kaynagi ziyaret et
for v in adj[s]:
if v not in parent: # henuz ziyaret edilmemis
parent[v] = s # ebeveyni = ben
dfs(adj, v, parent) # ozyinele
return parent
```
@fig-dfs-run bu çalışılan örneği adım adım izler: üstte yönlü çizge ($1 \to 2 \to 3 \to 4$ dibe in, sonra geri çekilip 5'e dal), altta olay şeridi — in/out olaylarının sırası, $\text{out}(4), \text{out}(3)$ olaylarının $\text{in}(5)$'ten **önce** gelmesi (dibe vur, geri sar, sonra 5).
```{python}
#| label: fig-dfs-run
#| fig-cap: "DFS çalışılan örnek: 1→2→3→4 dibe in, sonra geri çekilip 5'e dal (L10 §3, İMZA figür). ÜST: yönlü çizge — kenarlar 1→2, 2→3, 2→5, 3→4. Ziyaret (ileri) okları AMBER + sıra numarası: 1→2 [1], 2→3 [2], 3→4 [3], sonra 2→5 [4]. Geri-çekilme okları KESİKLİ GRİ: 4→3, 3→2 (özyineleme çözülmesi; 5 ziyaretinden ÖNCE). ALT: olay şeridi — in(1) in(2) in(3) in(4) out(4) out(3) in(5) out(5) out(2) out(1); 'in' amber dolu, 'out' soluk çerçeve. out(4) ve out(3), in(5)'ten ÖNCE: dibe vur (4), geri sar (out 4,3), sonra 5. Seviye kümeleri İZLENMEZ — geri çekilme = özyinelemenin çözülmesi (out'lar in'lerin TERSİ sırada kapanır). Veri MOTORDAN: dfs_visit_order(build_dfs_example(),1)['order']=[1,2,3,4,5]; events=[in1,in2,in3,in4,out4,out3,in5,out5,out2,out1] (Solomon L10 §3)."
#| fig-width: 11.0
#| fig-height: 7.0
# fig-dfs-run (L10 §3 İMZA): DFS çalışılan örnek + olay şeridi (in/out).
# Veri MOTORDAN (dfs_visit_order / build_dfs_example). networkx YOK — elle koordinat.
_DR_POS = {1: (0.0, 1.0), 2: (1.4, 1.0), 3: (2.8, 1.9), 4: (4.2, 1.9), 5: (2.8, 0.1)}
_DR_NODE_R = 0.26
_DR_FORWARD = [(1, 2, 1), (2, 3, 2), (3, 4, 3), (2, 5, 4)]
_DR_BACKTRACK = [(4, 3), (3, 2)]
def _dr_node(ax, node, is_source=False):
x, y = _DR_POS[node]
ax.add_patch(Circle((x, y), _DR_NODE_R,
facecolor=COL_AMBER_100 if is_source else COL_BG,
edgecolor=COL_ACCENT if is_source else COL_PRIMARY,
linewidth=3.0 if is_source else 1.9, zorder=5, clip_on=False))
ax.text(x, y, str(node), ha="center", va="center", fontsize=13,
color=COL_AMBER_700 if is_source else COL_TEXT, weight="bold", zorder=6)
def _dr_graph(ax):
for u, v, order_no in _DR_FORWARD:
x0, y0 = _DR_POS[u]
x1, y1 = _DR_POS[v]
ax.add_patch(FancyArrowPatch(
(x0, y0), (x1, y1), arrowstyle="-|>", mutation_scale=18,
color=COL_ACCENT, linewidth=2.6, zorder=3,
shrinkA=_DR_NODE_R * 60, shrinkB=_DR_NODE_R * 60))
mx, my = (x0 + x1) * 0.5, (y0 + y1) * 0.5
off_x = 0.16 if (u, v) == (2, 5) else 0.0
off_y = 0.18 if (u, v) in ((1, 2),) else 0.16
ax.add_patch(Circle((mx + off_x, my + off_y), 0.155, facecolor=COL_WHITE,
edgecolor=COL_ACCENT, linewidth=1.8, zorder=4))
ax.text(mx + off_x, my + off_y, str(order_no), ha="center", va="center",
fontsize=9, color=COL_AMBER_700, weight="bold", zorder=5)
for u, v in _DR_BACKTRACK:
x0, y0 = _DR_POS[u]
x1, y1 = _DR_POS[v]
ax.add_patch(FancyArrowPatch(
(x0, y0), (x1, y1), arrowstyle="-|>", mutation_scale=14,
color=COL_SLATE_400, linewidth=1.8, linestyle=(0, (4, 3)), zorder=2,
shrinkA=_DR_NODE_R * 60, shrinkB=_DR_NODE_R * 60,
connectionstyle="arc3,rad=0.28"))
for node in _DR_POS:
_dr_node(ax, node, is_source=(node == 1))
sx, sy = _DR_POS[1]
ax.text(sx, sy + _DR_NODE_R + 0.22, "kaynak", ha="center", va="bottom",
fontsize=9, color=COL_AMBER_700, weight="bold", style="italic", zorder=6)
lx, ly = 3.45, 0.55
ax.add_patch(FancyArrowPatch((lx, ly + 0.30), (lx + 0.55, ly + 0.30),
arrowstyle="-|>", mutation_scale=14, color=COL_ACCENT,
linewidth=2.4, zorder=4))
ax.text(lx + 0.68, ly + 0.30, "ileri (in) — özyinelemeye dal", ha="left",
va="center", fontsize=8.2, color=COL_AMBER_700, weight="bold", zorder=5)
ax.add_patch(FancyArrowPatch((lx, ly), (lx + 0.55, ly), arrowstyle="-|>",
mutation_scale=12, color=COL_SLATE_400, linewidth=1.8,
linestyle=(0, (4, 3)), zorder=4))
ax.text(lx + 0.68, ly, "geri çekilme (out) — özyineleme çözülmesi", ha="left",
va="center", fontsize=8.2, color=COL_SLATE_500, zorder=5)
def _dr_event_strip(ax, events):
n = len(events)
cell_w, cell_h = 0.96, 0.66
x0, y = 0.10, 0.0
ax.text(x0, y + cell_h + 0.30,
"olay dizisi (özyineleme zaman ekseni — soldan sağa)", ha="left",
va="center", fontsize=9.5, color=COL_TEXT, weight="bold", zorder=6)
for k, (kind, v) in enumerate(events):
x = x0 + k * cell_w
is_in = (kind == "in")
fc, ec, lw, tcol = ((COL_AMBER_100, COL_ACCENT, 2.4, COL_AMBER_700)
if is_in else (COL_WHITE, COL_SLATE_400, 1.4, COL_SLATE_500))
ax.add_patch(FancyBboxPatch(
(x, y), cell_w * 0.9, cell_h, boxstyle="round,pad=0.02,rounding_size=0.06",
fc=fc, ec=ec, linewidth=lw, zorder=3))
ax.text(x + cell_w * 0.45, y + cell_h * 0.5, f"{kind}({v})", ha="center",
va="center", fontsize=9.5, color=tcol, weight="bold", zorder=5)
ax.text(x + cell_w * 0.45, y - 0.20, str(k + 1), ha="center", va="center",
fontsize=7.5, color=COL_SLATE_500, zorder=4)
x_in4 = x0 + 3 * cell_w + cell_w * 0.45
ax.text(x_in4, y + cell_h + 0.06, "dibe vur (4)", ha="center", va="bottom",
fontsize=8, color=COL_AMBER_700, weight="bold", zorder=6)
x_ot4 = x0 + 4 * cell_w
x_ot3 = x0 + 6 * cell_w - cell_w * 0.1
yb = y + cell_h + 0.08
ax.plot([x_ot4 + 0.05, x_ot3], [yb, yb], color=COL_SLATE_500, linewidth=1.4, zorder=4)
ax.plot([x_ot4 + 0.05, x_ot4 + 0.05], [yb, yb - 0.10], color=COL_SLATE_500,
linewidth=1.4, zorder=4)
ax.plot([x_ot3, x_ot3], [yb, yb - 0.10], color=COL_SLATE_500, linewidth=1.4, zorder=4)
ax.text((x_ot4 + x_ot3) * 0.5 + 0.02, yb + 0.04, "geri sar (out 4,3)",
ha="center", va="bottom", fontsize=8, color=COL_SLATE_500, zorder=6)
x_in5 = x0 + 6 * cell_w + cell_w * 0.45
ax.annotate("sonra 5", xy=(x_in5, y + cell_h),
xytext=(x_in5, y + cell_h + 0.42), ha="center", va="bottom",
fontsize=8, color=COL_AMBER_700, weight="bold", zorder=6,
arrowprops=dict(arrowstyle="-|>", color=COL_ACCENT, linewidth=1.8))
return x0, cell_w, n
# ---- motor verisi + ASSERT (figür yalnız bunu çizer) ----
_dr_adj = build_dfs_example()
_dr_tr = dfs_visit_order(_dr_adj, 1)
_dr_order = _dr_tr["order"]
_dr_events = _dr_tr["events"]
assert _dr_order == [1, 2, 3, 4, 5], _dr_order
assert _dr_events == [("in", 1), ("in", 2), ("in", 3), ("in", 4),
("out", 4), ("out", 3), ("in", 5),
("out", 5), ("out", 2), ("out", 1)], _dr_events
assert (_dr_events.index(("out", 4)) < _dr_events.index(("in", 5))
and _dr_events.index(("out", 3)) < _dr_events.index(("in", 5)))
fig, (ax_g, ax_e) = plt.subplots(2, 1, figsize=(11.0, 7.0),
gridspec_kw={"height_ratios": [1.55, 1.0]})
fig.patch.set_facecolor(COL_WHITE)
_dr_graph(ax_g)
ax_g.set_xlim(-0.7, 6.6)
ax_g.set_ylim(-0.45, 2.65)
ax_g.set_aspect("equal")
ax_g.axis("off")
ax_g.set_title(
"DFS çalışılan örnek: 1→2→3→4 dibe in, sonra geri çekilip 5'e dal (Solomon L10 §3)",
color=COL_TEXT, fontsize=12.5, weight="bold", pad=8)
_dr_x0, _dr_cw, _dr_n = _dr_event_strip(ax_e, _dr_events)
ax_e.set_xlim(-0.25, _dr_x0 + _dr_n * _dr_cw + 0.30)
ax_e.set_ylim(-0.55, 1.40)
ax_e.set_aspect("equal")
ax_e.axis("off")
fig.text(0.5, 0.025,
"seviye kümeleri İZLENMEZ — dibe vur (4), geri sar, sonra 5 · "
"geri çekilme = özyinelemenin çözülmesi (out, in'lerin TERSİ sırada kapanır)",
ha="center", va="center", fontsize=8.6, color=COL_SLATE_500, style="italic")
fig.subplots_adjust(left=0.03, right=0.97, top=0.92, bottom=0.08, hspace=0.18)
plt.show()
```
## 4. DFS Doğruluğu {#sec-4-dfs-dogrulugu}
**İddia:** DFS, erişilebilir her $v$'yi ziyaret eder ve ebeveynini doğru atar.
**Çalışılan Örnek — kaynağa uzaklık üzerinden tümevarım.** Kaynağa uzaklık $k$ üzerinden tümevarım.
- **Temel ($k = 0$):** uzaklık 0 olan tek düğüm kaynağın kendisidir; algoritma ilk satırda onu doğru kurar. ✓
- **Adım ($k \to k+1$):** $v$, kaynaktan uzaklık $k+1$ olsun. En kısa yolda $v$'den bir önceki düğüm $u$'nun uzaklığı $k$'dır → tümevarım varsayımıyla $u$ doğru ziyaret edilir. visit($u$) çağrıldığında, $v \in \text{Adj}^{+}(u)$ olduğundan DFS $v$'yi değerlendirir. İki durum: ya $P(v) \neq \text{None}$ (zaten uygun bir ebeveyn bulunmuş) ya da $P(v) = \text{None}$ (bir sonraki satır ebeveyni doğru atar). Her iki durumda da $v$'nin ebeveyni doğru. ✓
Sezgisel olarak basit; biçimsel tümevarım totoloji gibi hissettirebilir ama değil.
## 5. DFS Çalışma Süresi O(E) {#sec-5-dfs-calisma-suresi}
Her düğüm en fazla bir kez ziyaret edilir (visit her düğüm için bir kez çağrılır); her kenar en fazla bir kez gezilir (kenarın "çıkış" düğümü bir kez ziyaret edildiğinden). Önemli ayrım: BFS, başta $O(V)$ yer ayırdığı için $O(V + E)$'dir; DFS ise yalnızca **erişilebilir** kenarlara dokunur, hiç erişilemeyen düğümü görmez → $O(E)$.
> *"depth-first search... it just takes order e time."* — Solomon, 22:09
(Kenarsız bir çizgede BFS yine $O(V)$, DFS ise $O(E) = O(0)$ işi yapar; sınırlar birebir aynı değildir.)
## 6. DFS En Kısa Yol Vermez {#sec-6-dfs-en-kisa-yol-vermez}
DFS'in ürettiği yol **en kısa olmak zorunda değildir**.
> *"there's no reason why the path that we get should be the shortest."* — Solomon, 24:01
Uç örnek: bir **çevrim çizgesi** (büyük halka). Kaynaktan başlayıp komşu komşuyu özyinelemeli çağırırsak, son düğüme 4 düğümlük bir zincirin arkasından varırız — oysa tek bir kenarla doğrudan gidilebilirdi. DFS o kenarı *seçmedi*. Bu yüzden ağırlıksız en kısa yol için **BFS** kullanılır; DFS yapısal sorular içindir.
## 7. Bağlılık ve Bağlı Bileşenler {#sec-7-baglilik-ve-bagli-bilesenler}
Bir çizge **bağlı (connected)** ise her düğümden her düğüme bir yol vardır.
> *"a graph is connected if there's a path getting from every vertex to every other vertex."* — Solomon, 25:14
Yönlü çizgede bağlılık tuhaftır ($u \to v$ var ama $v \to u$ yok olabilir), bu yüzden çoğunlukla **yönsüz** çizgelerde konuşulur: düğümler "kümeler" hâlinde gelir — bir **bağlı bileşen (connected component)**.
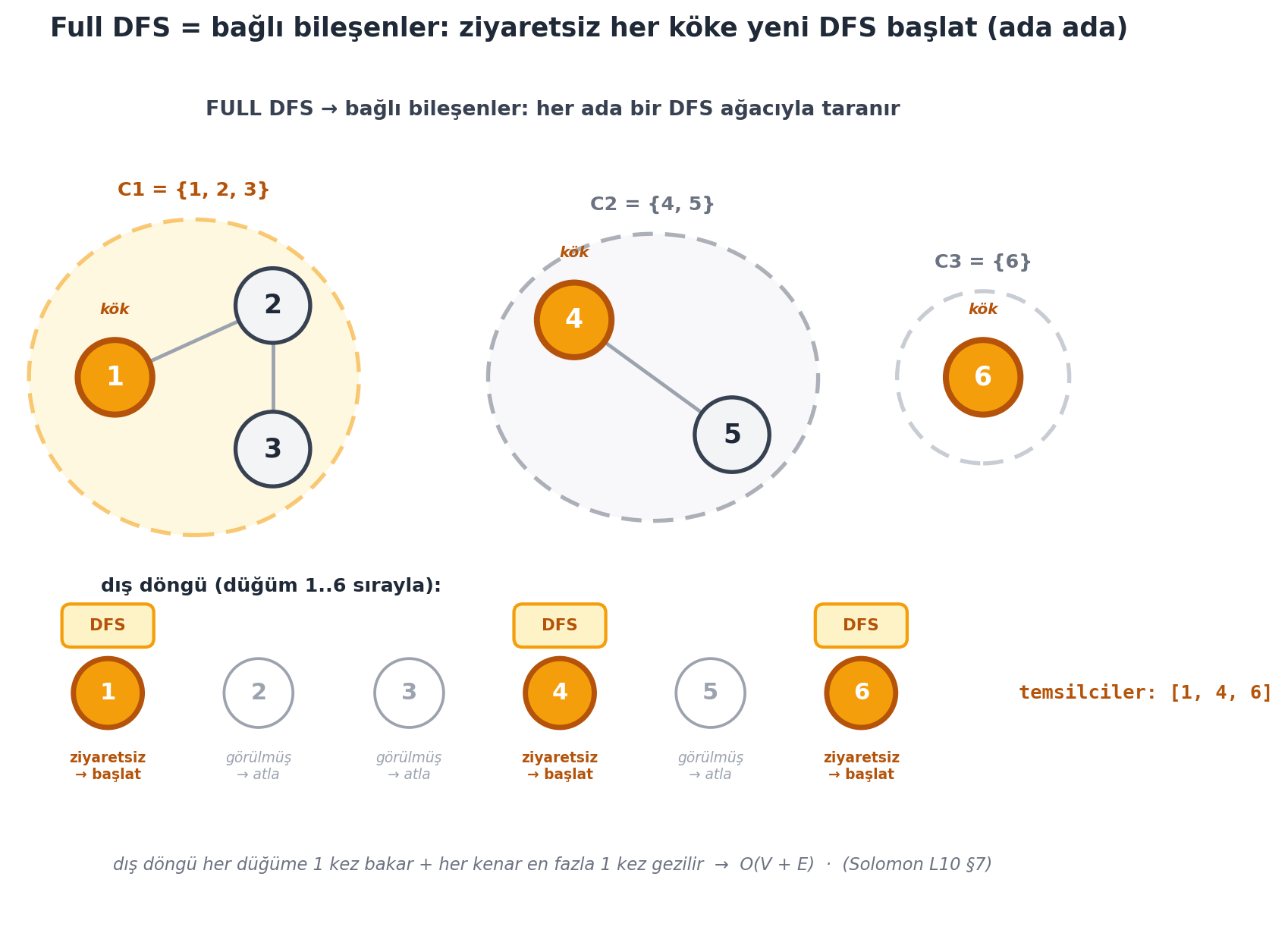
**Bağlı bileşenler problemi:** tüm kümeleri listele. Çözüm **full DFS**: tüm düğümler üzerinde bir döngü; düğüm henüz ziyaret edilmemişse ondan DFS başlat (o bileşeni "flood fill" eder), topla, devam et. Her kenar en fazla bir kez gezilir (bir düğüm iki bileşende olamaz) → $O(V + E)$.
```python
def full_dfs(adj, V):
parent = {}
components = []
for s in V: # tum dugumler uzerinde dongu
if s not in parent: # yeni bilesen
parent[s] = None
dfs(adj, s, parent)
components.append(s) # bu bilesenin temsilcisi
return components, parent
```
@fig-components full DFS'i "ada keşfi" olarak gösterir: üç bağlı bileşen ($\{1,2,3\}$, $\{4,5\}$, $\{6\}$), her birinin temsilci kökü ($1, 4, 6$), ve altta dış-döngünün düğümleri sırayla tarayışı (ziyaretsiz köke yeni DFS başlat, görülmüşü atla).
```{python}
#| label: fig-components
#| fig-cap: "Full DFS = bağlı bileşenler: ziyaretsiz her köke yeni DFS başlat (ada ada) (L10 §7, İMZA figür). ÜST: 3 ada çizgesi — küme 1 {1,2,3} (üçgen-vari, amber halo, bileşen C₁), küme 2 {4,5} (çift, slate halo, C₂), küme 3 {6} (tek düğüm, beyaz halo, C₃); her ada altında bileşen etiketi. Temsilci kökler (her bileşenin ilk ziyaret edilen düğümü) amber dolgulu + 'kök' etiketi: 1, 4, 6. ALT: full DFS dış-döngü şeridi — düğümler 1..6 SIRAYLA taranır; 1 ziyaretsiz → DFS başlat (ada 1'i sular), 2,3 görülmüş → atla, 4 ziyaretsiz → DFS başlat (ada 2), 5 atla, 6 ziyaretsiz → DFS başlat (ada 3); amber 'DFS' rozeti her başlatmada. Dış döngü her düğüme 1 kez bakar + her kenar en fazla 1 kez gezilir → O(V+E). Veri MOTORDAN: connected_components=[[1,2,3],[4,5],[6]]; full_dfs temsilcileri=[1,4,6] (Solomon L10 §7)."
#| fig-width: 10.5
#| fig-height: 6.5
# fig-components (L10 §7 İMZA): full DFS → bağlı bileşenler (3 ada).
# Veri MOTORDAN (make_undirected / connected_components / full_dfs). networkx YOK.
_CMP_POS = {
1: (0.35, 1.05), 2: (1.45, 1.55), 3: (1.45, 0.55), # ada 1
4: (3.55, 1.45), 5: (4.65, 0.65), # ada 2
6: (6.40, 1.05), # ada 3
}
_CMP_EDGES = [(1, 2), (2, 3), (4, 5)]
_CMP_R = 0.26
_CMP_HALO = [
(COL_AMBER_100, COL_ACCENT, COL_AMBER_700),
(COL_BG, COL_SLATE_500, COL_SLATE_500),
(COL_WHITE, COL_SLATE_400, COL_SLATE_500),
]
def _cmp_halo(members):
xs = [_CMP_POS[v][0] for v in members]
ys = [_CMP_POS[v][1] for v in members]
cx = (min(xs) + max(xs)) / 2.0
cy = (min(ys) + max(ys)) / 2.0
rx = (max(xs) - min(xs)) / 2.0 + _CMP_R + 0.34
ry = (max(ys) - min(ys)) / 2.0 + _CMP_R + 0.34
return cx, cy, 2 * rx, 2 * ry
# ---- motor verisi + ASSERT (figür yalnız bunu çizer) ----
_cmp_ug = make_undirected([(1, 2), (2, 3), (4, 5)])
_cmp_ug.setdefault(6, [])
_cmp_comps = connected_components(_cmp_ug)
_cmp_parent, _cmp_reps = full_dfs(_cmp_ug)
assert _cmp_comps == [[1, 2, 3], [4, 5], [6]], _cmp_comps
assert _cmp_reps == [1, 4, 6], _cmp_reps
_cmp_comp_of = {v: ci for ci, members in enumerate(_cmp_comps) for v in members}
_cmp_rep_set = set(_cmp_reps)
fig, ax = plt.subplots(figsize=(10.5, 6.5))
fig.patch.set_facecolor(COL_WHITE)
for ci, members in enumerate(_cmp_comps):
cx, cy, w, h = _cmp_halo(members)
fc, ec, _tc = _CMP_HALO[ci]
ax.add_patch(Ellipse((cx, cy), w, h, facecolor=fc, edgecolor=ec,
linewidth=2.0, linestyle=(0, (5, 3)), alpha=0.55, zorder=0))
ax.text(cx, cy + h / 2 + 0.14,
f"C{ci + 1} = {{{', '.join(str(v) for v in members)}}}", ha="center",
va="bottom", fontsize=9.5, color=_CMP_HALO[ci][2], weight="bold", zorder=6)
for u, v in _CMP_EDGES:
x0, y0 = _CMP_POS[u]
x1, y1 = _CMP_POS[v]
ax.plot([x0, x1], [y0, y1], color=COL_SLATE_400, linewidth=1.8, zorder=2,
solid_capstyle="round")
for v, (x, y) in _CMP_POS.items():
is_rep = v in _cmp_rep_set
fc, ec, tcol, lw = ((COL_ACCENT, COL_AMBER_700, COL_WHITE, 3.0)
if is_rep else (COL_BG, COL_PRIMARY, COL_TEXT, 2.0))
ax.add_patch(Circle((x, y), _CMP_R, facecolor=fc, edgecolor=ec,
linewidth=lw, zorder=5))
ax.text(x, y, str(v), ha="center", va="center", fontsize=13, color=tcol,
weight="bold", zorder=6)
if is_rep:
ax.text(x, y + _CMP_R + 0.16, "kök", ha="center", va="bottom",
fontsize=7.5, color=COL_AMBER_700, weight="bold", style="italic", zorder=6)
ax.text(3.4, 2.92, "FULL DFS → bağlı bileşenler: her ada bir DFS ağacıyla taranır",
ha="center", va="center", fontsize=10, color=COL_PRIMARY, weight="bold", zorder=6)
_cmp_strip_y, _cmp_cell_w, _cmp_x0 = -1.15, 1.05, 0.30
_cmp_order = list(_cmp_ug.keys())
assert _cmp_order == [1, 2, 3, 4, 5, 6], _cmp_order
_cmp_seen = set()
for k, v in enumerate(_cmp_order):
cx = _cmp_x0 + k * _cmp_cell_w
if v not in _cmp_seen:
start = True
for m in _cmp_comps[_cmp_comp_of[v]]:
_cmp_seen.add(m)
fc, ec, tcol, lw = COL_ACCENT, COL_AMBER_700, COL_WHITE, 2.6
else:
start = False
fc, ec, tcol, lw = COL_WHITE, COL_SLATE_400, COL_SLATE_400, 1.4
ax.add_patch(Circle((cx, _cmp_strip_y), 0.24, facecolor=fc, edgecolor=ec,
linewidth=lw, zorder=5))
ax.text(cx, _cmp_strip_y, str(v), ha="center", va="center", fontsize=11.5,
color=tcol, weight="bold", zorder=6)
if start:
ax.add_patch(FancyBboxPatch(
(cx - 0.30, _cmp_strip_y + 0.34), 0.60, 0.26,
boxstyle="round,pad=0.02,rounding_size=0.06",
fc=COL_AMBER_100, ec=COL_ACCENT, linewidth=1.6, zorder=5))
ax.text(cx, _cmp_strip_y + 0.47, "DFS", ha="center", va="center",
fontsize=8, color=COL_AMBER_700, weight="bold", zorder=6)
ax.text(cx, _cmp_strip_y - 0.40, "ziyaretsiz\n→ başlat", ha="center",
va="top", fontsize=7, color=COL_AMBER_700, weight="bold", zorder=6)
else:
ax.text(cx, _cmp_strip_y - 0.40, "görülmüş\n→ atla", ha="center", va="top",
fontsize=7, color=COL_SLATE_400, style="italic", zorder=6)
ax.text(_cmp_x0 - 0.05, _cmp_strip_y + 0.75, "dış döngü (düğüm 1..6 sırayla):",
ha="left", va="center", fontsize=9.5, color=COL_TEXT, weight="bold", zorder=6)
ax.text(_cmp_x0 + len(_cmp_order) * _cmp_cell_w + 0.05, _cmp_strip_y,
f"temsilciler: {_cmp_reps}", ha="left", va="center", fontsize=9.5,
color=COL_AMBER_700, weight="bold", family="monospace", zorder=6)
fig.suptitle(
"Full DFS = bağlı bileşenler: ziyaretsiz her köke yeni DFS başlat (ada ada)",
color=COL_TEXT, fontsize=13, weight="bold", y=0.975)
ax.text(3.4, -2.35,
"dış döngü her düğüme 1 kez bakar + her kenar en fazla 1 kez gezilir → O(V + E)"
" · (Solomon L10 §7)",
ha="center", va="center", fontsize=8.5, color=COL_SLATE_500, style="italic", zorder=6)
ax.set_xlim(-0.35, 7.30)
ax.set_ylim(-2.70, 3.25)
ax.set_aspect("equal")
ax.axis("off")
plt.tight_layout()
plt.show()
```
## 8. Yönlü Çevrimsiz Çizge (DAG) ve Topolojik Sıralama {#sec-8-dag-topolojik-siralama}
Bir **DAG (Directed Acyclic Graph)**: yönlü kenarlı, **çevrimsiz** çizge. (Yönlendirilmiş bir ağaç bir DAG örneğidir.)
> *"a DAG is a Directed Acyclic Graph."* — Solomon, 32:28
**Topolojik sıralama:** her düğüme bir sıra indeksi $f$ atayan, şu özelliği sağlayan bir düzen: her $u \to v$ kenarı için $f(u) < f(v)$ ($u$, $v$'den önce gelir).
> *"if I have a directed edge from u to v, then f of u is less than f of v."* — Solomon, 34:46
Topolojik sıralama **benzersiz değildir** — $A \to B$, $A \to C$, $B \to D$, $C \to D$ çizgesinde hem "A C B D" hem "A B C D" geçerlidir. Bu "özgürlük", algoritmanın çoktan birini bulmasına izin verir.
## 9. Bitiş Sırası → Topolojik Sıralama {#sec-9-bitis-sirasi-topolojik}
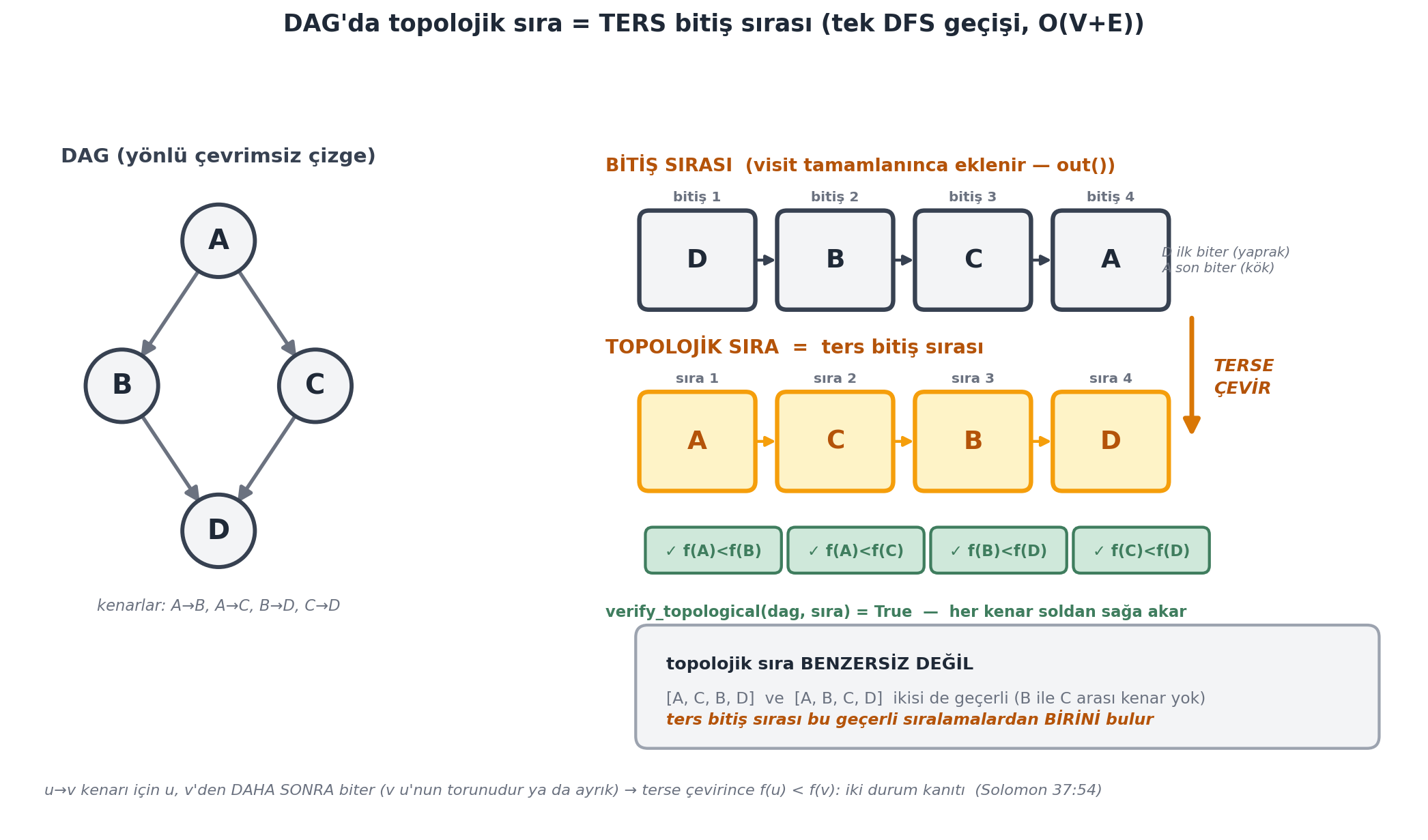
**Bitiş sırası (finishing order):** full DFS çalıştır; bir düğümün visit çağrısı **tamamlandığında** (tüm komşuları gezildiğinde) onu sıraya ekle. **İddia:** bir DAG'da, **bitiş sırasının tersi** geçerli bir topolojik sıralamadır.
> *"the reverse of the finishing order is a topological order."* — Solomon, 37:54
**Çalışılan Örnek — kanıt (iki durum).** Bir $u \to v$ kenarı al; ters bitiş sırasında $u$'nun $v$'den önce geldiğini göstermeliyiz.
- **Durum 1 — $u$, $v$'den önce ziyaret edildi:** visit($u$), $v$'yi (henüz ziyaretsizse) çağırır; visit($v$), visit($u$)'dan **önce tamamlanır**. Ters sırada bu, $u$'yu $v$'nin önüne koyar. ✓
- **Durum 2 — $v$, $u$'dan önce ziyaret edildi:** çizge çevrimsiz olduğundan $v$'den $u$'ya yol **yoktur** (olsaydı çevrim olurdu). O hâlde visit($v$), $u$'yu hiç görmeden tamamlanır → Durum 1'le aynı sonuç: ters sırada $u$, $v$'den önce. ✓
@fig-topo-order bu mekanizmayı gösterir: örnek DAG, full DFS'in **bitiş sırası** $[D, B, C, A]$ (D yaprak, ilk biter; A kök, son biter), ve onun **tersi** = topolojik sıra $[A, C, B, D]$; her DAG kenarı için $f(u) < f(v)$ onayı yeşil rozetle, ve "benzersiz değil" notu ($[A, B, C, D]$ de geçerli).
```{python}
#| label: fig-topo-order
#| fig-cap: "DAG'da topolojik sıra = TERS bitiş sırası (tek DFS geçişi, O(V+E)) (L10 §8-9, İMZA figür). ÜST-SOL: örnek DAG — A üstte, B ve C ortada yan yana, D altta (elmas); yönlü oklar A→B, A→C, B→D, C→D. ORTA serit: BİTİŞ SIRASI (visit tamamlanınca out() ile eklenir) [D, B, C, A]; D ilk biter (yaprak), A son biter (kök). 'TERSE ÇEVİR' dönüş oku. ALT serit: TOPOLOJİK SIRA = ters bitiş = [A, C, B, D] (amber kutular); her DAG kenarı için f(u)<f(v) onayı yeşil ✓ rozeti (A<C, A<B, B<D, C<D); verify_topological=True. YAN NOT: topolojik sıra BENZERSİZ DEĞİL — [A, C, B, D] ve [A, B, C, D] ikisi de geçerli (B-C arası kenar yok); ters bitiş bunlardan BİRİNİ bulur. Kanıt iki durum (Solomon 37:54). Veri MOTORDAN: build_dag_example={A:[B,C],B:[D],C:[D],D:[]}; finishing_order=[D,B,C,A]; topological_order=[A,C,B,D]; verify=True."
#| fig-width: 11.0
#| fig-height: 7.0
# fig-topo-order (L10 §8-9 İMZA): ters bitiş sırası = topolojik sıra.
# Veri MOTORDAN (build_dag_example / finishing_order / topological_order /
# verify_topological). networkx YOK — elle koordinat.
_TO_POS = {"A": (1.50, 2.60), "B": (0.70, 1.40), "C": (2.30, 1.40), "D": (1.50, 0.20)}
_TO_DAG_EDGES = [("A", "B"), ("A", "C"), ("B", "D"), ("C", "D")]
_TO_R = 0.30
_TO_COL_OK = "#3f7d5e"
_TO_COL_OK_BG = "#cfe8da"
def _to_draw_dag(ax):
for u, v in _TO_DAG_EDGES:
ux, uy = _TO_POS[u]
vx, vy = _TO_POS[v]
ax.add_patch(FancyArrowPatch(
(ux, uy), (vx, vy), arrowstyle="-|>", mutation_scale=16,
color=COL_SLATE_500, linewidth=2.0,
shrinkA=_TO_R * 62, shrinkB=_TO_R * 62, zorder=2))
for v, (x, y) in _TO_POS.items():
ax.add_patch(Circle((x, y), _TO_R, facecolor=COL_BG, edgecolor=COL_PRIMARY,
linewidth=2.2, zorder=5))
ax.text(x, y, v, ha="center", va="center", fontsize=15, color=COL_TEXT,
weight="bold", zorder=6)
ax.text(1.50, 3.30, "DAG (yönlü çevrimsiz çizge)", ha="center", va="center",
fontsize=11, color=COL_PRIMARY, weight="bold", zorder=6)
ax.text(1.50, -0.42, "kenarlar: A→B, A→C, B→D, C→D", ha="center", va="center",
fontsize=8.5, color=COL_SLATE_500, style="italic", zorder=6)
def _to_draw_strip(ax, x0, y, seq, fill, edge, tcol, prefix_label):
cell_w, cell_h = 0.92, 0.78
centers = {}
for k, node in enumerate(seq):
x = x0 + k * (cell_w + 0.22)
ax.add_patch(FancyBboxPatch(
(x, y), cell_w, cell_h, boxstyle="round,pad=0.02,rounding_size=0.08",
fc=fill, ec=edge, linewidth=2.4, zorder=4))
cx, cy = x + cell_w * 0.5, y + cell_h * 0.5
centers[node] = (cx, cy)
ax.text(cx, cy, node, ha="center", va="center", fontsize=14, color=tcol,
weight="bold", zorder=5)
ax.text(cx, y + cell_h + 0.13, f"{prefix_label}{k + 1}", ha="center",
va="center", fontsize=7.5, color=COL_SLATE_500, weight="bold", zorder=5)
if k < len(seq) - 1:
ax.add_patch(FancyArrowPatch(
(x + cell_w, cy), (x + cell_w + 0.22, cy), arrowstyle="-|>",
mutation_scale=11, color=edge, linewidth=1.6, zorder=4))
return centers, cell_w, cell_h
# ---- motor verisi + ASSERT (figür yalnız bunu çizer) ----
_to_dag = build_dag_example()
_to_fin = finishing_order(_to_dag)
_to_topo = topological_order(_to_dag)
_to_ok = verify_topological(_to_dag, _to_topo)
assert _to_dag == {"A": ["B", "C"], "B": ["D"], "C": ["D"], "D": []}, _to_dag
assert _to_fin == ["D", "B", "C", "A"], _to_fin
assert _to_topo == ["A", "C", "B", "D"], _to_topo
assert _to_ok is True and list(reversed(_to_fin)) == _to_topo
fig, ax = plt.subplots(figsize=(11.0, 7.0))
fig.patch.set_facecolor(COL_WHITE)
_to_draw_dag(ax)
_to_mid_x0, _to_mid_y = 5.0, 2.05
ax.text(_to_mid_x0 - 0.30, _to_mid_y + 1.18,
"BİTİŞ SIRASI (visit tamamlanınca eklenir — out())", ha="left", va="center",
fontsize=10, color=COL_AMBER_700, weight="bold", zorder=6)
_to_draw_strip(ax, _to_mid_x0, _to_mid_y, _to_fin, fill=COL_BG, edge=COL_PRIMARY,
tcol=COL_TEXT, prefix_label="bitiş ")
ax.text(_to_mid_x0 + 4.30, _to_mid_y + 0.39, "D ilk biter (yaprak)\nA son biter (kök)",
ha="left", va="center", fontsize=7.5, color=COL_SLATE_500, style="italic", zorder=6)
_to_rev_x = _to_mid_x0 + 4.55
ax.add_patch(FancyArrowPatch(
(_to_rev_x, _to_mid_y - 0.06), (_to_rev_x, _to_mid_y - 1.10), arrowstyle="-|>",
mutation_scale=18, color=COL_AMBER_600, linewidth=2.6, zorder=6))
ax.text(_to_rev_x + 0.18, _to_mid_y - 0.58, "TERSE\nÇEVİR", ha="left", va="center",
fontsize=9.5, color=COL_AMBER_700, weight="bold", style="italic", zorder=6)
_to_bot_x0, _to_bot_y = 5.0, 0.55
ax.text(_to_bot_x0 - 0.30, _to_bot_y + 1.18, "TOPOLOJİK SIRA = ters bitiş sırası",
ha="left", va="center", fontsize=10.5, color=COL_AMBER_700, weight="bold", zorder=6)
_to_draw_strip(ax, _to_bot_x0, _to_bot_y, _to_topo, fill=COL_AMBER_100,
edge=COL_ACCENT, tcol=COL_AMBER_700, prefix_label="sıra ")
_to_f = {v: i for i, v in enumerate(_to_topo)}
_to_badge_y = _to_bot_y - 0.52
_to_badge_x0, _to_badge_w = _to_bot_x0 + 0.05, 1.18
for k, (u, v) in enumerate(_TO_DAG_EDGES):
assert _to_f[u] < _to_f[v], (u, v, _to_f)
bx = _to_badge_x0 + k * _to_badge_w
ax.add_patch(FancyBboxPatch(
(bx, _to_badge_y - 0.16), _to_badge_w * 0.92, 0.34,
boxstyle="round,pad=0.02,rounding_size=0.06",
fc=_TO_COL_OK_BG, ec=_TO_COL_OK, linewidth=1.6, zorder=4))
ax.text(bx + _to_badge_w * 0.46, _to_badge_y, f"✓ f({u})<f({v})", ha="center",
va="center", fontsize=8.5, color=_TO_COL_OK, weight="bold", zorder=5)
ax.text(_to_bot_x0 - 0.30, _to_badge_y - 0.50,
f"verify_topological(dag, sıra) = {_to_ok} — her kenar soldan sağa akar",
ha="left", va="center", fontsize=8.5, color=_TO_COL_OK, weight="bold", zorder=6)
_to_note_x, _to_note_y, _to_note_w, _to_note_h = 5.0, -1.55, 6.05, 0.92
ax.add_patch(FancyBboxPatch(
(_to_note_x, _to_note_y), _to_note_w, _to_note_h,
boxstyle="round,pad=0.05,rounding_size=0.10",
fc=COL_BG, ec=COL_SLATE_400, linewidth=1.6, zorder=3))
ax.text(_to_note_x + 0.20, _to_note_y + _to_note_h - 0.26,
"topolojik sıra BENZERSİZ DEĞİL", ha="left", va="center", fontsize=9.5,
color=COL_TEXT, weight="bold", zorder=5)
ax.text(_to_note_x + 0.20, _to_note_y + _to_note_h - 0.56,
"[A, C, B, D] ve [A, B, C, D] ikisi de geçerli (B ile C arası kenar yok)",
ha="left", va="center", fontsize=8.8, color=COL_SLATE_500, zorder=5)
ax.text(_to_note_x + 0.20, _to_note_y + 0.20,
"ters bitiş sırası bu geçerli sıralamalardan BİRİNİ bulur", ha="left",
va="center", fontsize=8.8, color=COL_AMBER_700, style="italic",
weight="bold", zorder=5)
fig.suptitle(
"DAG'da topolojik sıra = TERS bitiş sırası (tek DFS geçişi, O(V+E))",
color=COL_TEXT, fontsize=13, weight="bold", y=0.975)
ax.text(0.06, -1.95,
"u→v kenarı için u, v'den DAHA SONRA biter (v u'nun torunudur ya da "
"ayrık) → terse çevirince f(u) < f(v): iki durum kanıtı (Solomon 37:54)",
ha="left", va="center", fontsize=8.4, color=COL_SLATE_500, style="italic", zorder=6)
ax.set_xlim(-0.2, 11.4)
ax.set_ylim(-2.25, 3.65)
ax.set_aspect("equal")
ax.axis("off")
plt.tight_layout()
plt.show()
```
## 10. Çevrim Tespiti {#sec-10-cevrim-tespiti}
DAG değilsek topolojik sıralama elde edemeyiz. Yani: ters bitiş sırasını hesapla, sonra her kenarın $f(u) < f(v)$ ilişkisine uyup uymadığını kontrol et. **Uymayan bir kenar bulursak çizge DAG değildir → bir çevrim vardır.** (Aslında: topolojik sıralama var $\iff$ çizge DAG.)
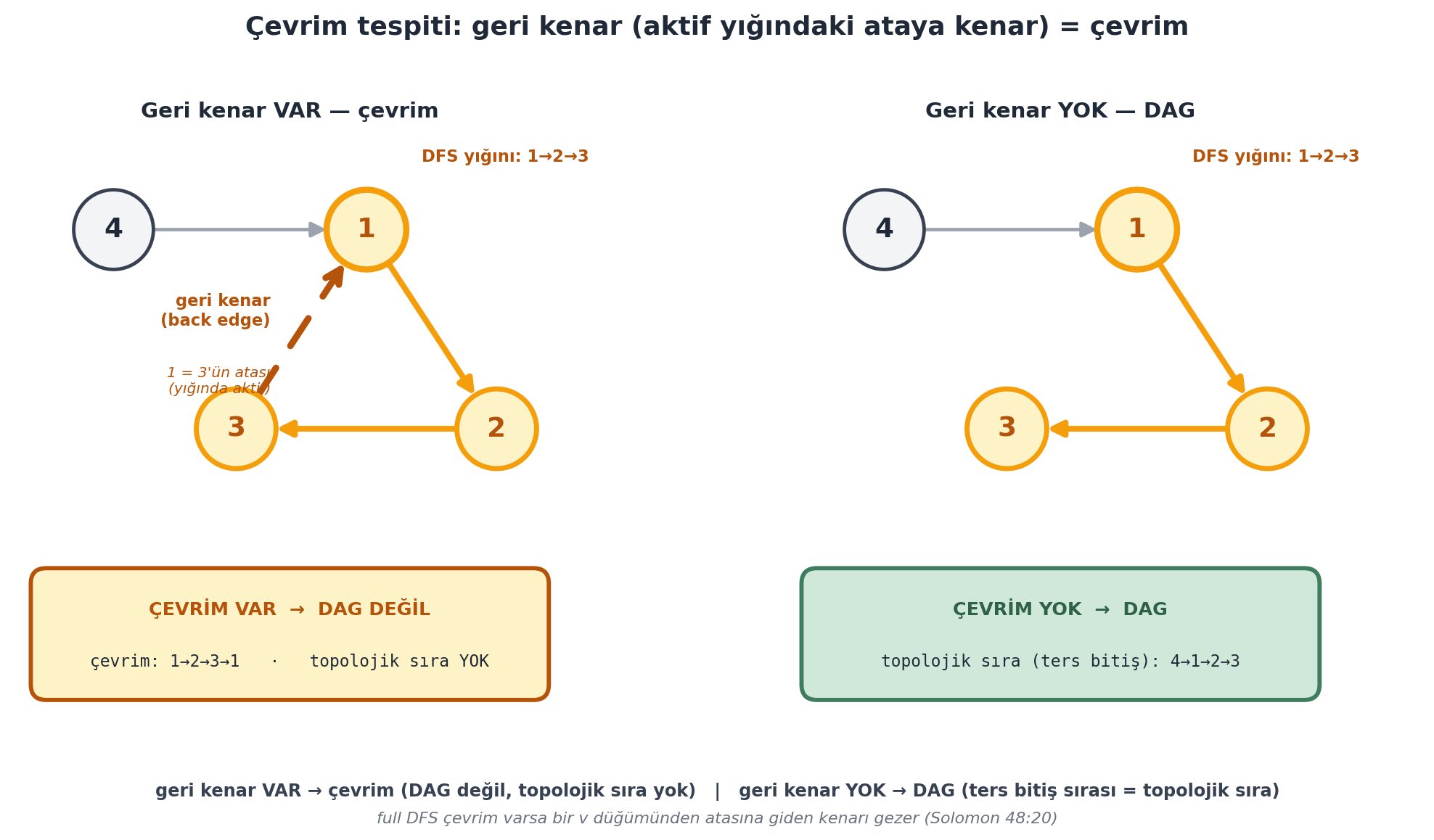
Çevrimi yalnızca tespit değil **bulmak** için: $G$ çevrim içeriyorsa, full DFS bir $v$ düğümünden onun bir **atasına (ancestor)** giden bir kenar gezer (atası = özyineleme ağacında $v$'den önce gelen düğüm).
> *"full DFS will traverse an edge from a vertex v to some ancestor of v."* — Solomon, 48:20
Kanıt taslağı: çevrim $v_0 \to v_1 \to \ldots \to v_k \to v_0$ olsun; $v_0$'ı DFS'in ilk gördüğü düğüm seç. $v_0$'ın özyineleme ağacı tamamlanmadan, ondan erişilebilen $v_1, \ldots, v_k$ de tamamlanır; $v_k$ komşularını gezerken $v_0$ kenarını görür — bu, $v_k$'den atası $v_0$'a giden **geri kenardır (back edge)**. DFS sırasında bu geri kenarı yakaladığın an çevrimi bulmuş olursun.
@fig-cycle-detect bu ayrımı iki panelle gösterir: solda çevrimli çizge ($1 \to 2 \to 3 \to 1$ + $4 \to 1$), DFS yığını $1 \to 2 \to 3$ aktifken $3 \to 1$ bir **geri kenardır** (1, 3'ün atası) → çevrim $[1,2,3,1]$, DAG değil; sağda $3 \to 1$ kaldırılmış, geri kenar yok → DAG, topolojik sıra $[4,1,2,3]$.
```{python}
#| label: fig-cycle-detect
#| fig-cap: "Çevrim tespiti: geri kenar (aktif yığındaki ataya kenar) = çevrim (L10 §10, İMZA figür). SOL panel — çevrimli çizge: 1→2→3→1 üçgeni + 4→1 dış kenarı. DFS özyineleme yolu 1→2→3 amber (aktif yığın). 3'ten 1'e giden kenar KALIN AMBER KESİKLİ + 'geri kenar (back edge)' etiketi — 1, 3'ün ATASIDIR (özyineleme yığınında hâlâ aktif). Sonuç: ÇEVRİM VAR → DAG DEĞİL; çevrim [1,2,3,1], topolojik sıra YOK. SAĞ panel — aynı yapı ama 3→1 kenarı KALDIRILMIŞ (3 çıkışsız): DFS temiz biter, geri kenar yok, çevrim yok → DAG; ters bitiş sırası = topolojik sıra [4,1,2,3]. Full DFS çevrim varsa bir v düğümünden atasına giden kenarı gezer. Veri MOTORDAN: find_cycle({1:[2],2:[3],3:[1],4:[1]})=[1,2,3,1]; find_cycle(3→1 kaldırılmış)=None; topological_order=[4,1,2,3]; verify=True (Solomon 48:20)."
#| fig-width: 11.0
#| fig-height: 6.0
# fig-cycle-detect (L10 §10 İMZA): geri kenar = çevrim (çevrimli vs DAG).
# Veri MOTORDAN (find_cycle / topological_order / verify_topological). networkx YOK.
_CD_POS = {1: (1.10, 1.85), 2: (1.95, 0.55), 3: (0.25, 0.55), 4: (-0.55, 1.85)}
_CD_R = 0.26
_CD_DFS_PATH = [1, 2, 3]
_CD_PATH_SET = set(_CD_DFS_PATH)
def _cd_endpoints(u, v, r=_CD_R):
x0, y0 = _CD_POS[u]
x1, y1 = _CD_POS[v]
dx, dy = x1 - x0, y1 - y0
dist = math.hypot(dx, dy)
ux, uy = dx / dist, dy / dist
return (x0 + ux * r, y0 + uy * r), (x1 - ux * r, y1 - uy * r)
def _cd_node(ax, v, on_path, source=False):
x, y = _CD_POS[v]
if on_path:
fc, ec, tcol, lw = COL_AMBER_100, COL_ACCENT, COL_AMBER_700, 2.6
else:
fc, ec, tcol, lw = COL_BG, COL_PRIMARY, COL_TEXT, 1.8
if source:
lw = 3.2
ax.add_patch(Circle((x, y), _CD_R, facecolor=fc, edgecolor=ec, linewidth=lw, zorder=6))
ax.text(x, y, str(v), ha="center", va="center", fontsize=14, color=tcol,
weight="bold", zorder=7)
def _cd_dir_edge(ax, u, v, color, lw, dashed=False, zorder=3, mut=16):
(x0, y0), (x1, y1) = _cd_endpoints(u, v)
ls = (0, (5, 4)) if dashed else "solid"
ax.add_patch(FancyArrowPatch(
(x0, y0), (x1, y1), arrowstyle="-|>", mutation_scale=mut, color=color,
linewidth=lw, linestyle=ls, zorder=zorder, shrinkA=0, shrinkB=0))
def _cd_panel(ax, edges, back_edge, title, is_cyclic, cycle_seq, topo=None):
for (u, v) in edges:
on_path = (u in _CD_PATH_SET and v in _CD_PATH_SET
and abs(_CD_DFS_PATH.index(u) - _CD_DFS_PATH.index(v)) == 1
and _CD_DFS_PATH.index(u) < _CD_DFS_PATH.index(v)) \
if (u in _CD_PATH_SET and v in _CD_PATH_SET) else False
if on_path:
_cd_dir_edge(ax, u, v, COL_ACCENT, 3.0, zorder=4)
else:
_cd_dir_edge(ax, u, v, COL_SLATE_400, 1.8, zorder=3)
if back_edge is not None:
bu, bv = back_edge
_cd_dir_edge(ax, bu, bv, COL_AMBER_700, 3.4, dashed=True, zorder=5, mut=20)
x0, y0 = _CD_POS[bu]
x1, y1 = _CD_POS[bv]
mx, my = (x0 + x1) / 2.0, (y0 + y1) / 2.0
ax.text(mx - 0.20, my + 0.12, "geri kenar\n(back edge)", ha="right",
va="center", fontsize=8.5, color=COL_AMBER_700, weight="bold", zorder=8)
ax.text(mx - 0.20, my - 0.34, f"{bv} = {bu}'ün atası\n(yığında aktif)",
ha="right", va="center", fontsize=7.6, color=COL_AMBER_700,
style="italic", zorder=8)
for v in _CD_POS:
_cd_node(ax, v, on_path=(v in _CD_PATH_SET), source=(v == 1))
ax.text(_CD_POS[1][0] + _CD_R + 0.10, _CD_POS[1][1] + _CD_R + 0.16,
"DFS yığını: 1→2→3", ha="left", va="bottom", fontsize=8.5,
color=COL_AMBER_700, weight="bold", zorder=8)
if is_cyclic:
seq_txt = "→".join(str(x) for x in cycle_seq)
rfc, rec, rtxt = COL_AMBER_100, COL_AMBER_700, COL_AMBER_700
msg1 = "ÇEVRİM VAR → DAG DEĞİL"
msg2 = f"çevrim: {seq_txt} · topolojik sıra YOK"
else:
rfc, rec, rtxt = "#cfe8da", "#3f7d5e", "#2f6048"
msg1 = "ÇEVRİM YOK → DAG"
topo_txt = "→".join(str(x) for x in topo)
msg2 = f"topolojik sıra (ters bitiş): {topo_txt}"
ax.add_patch(FancyBboxPatch(
(-1.05, -1.18), 3.30, 0.78, boxstyle="round,pad=0.04,rounding_size=0.10",
fc=rfc, ec=rec, linewidth=2.2, zorder=4))
ax.text(0.60, -0.62, msg1, ha="center", va="center", fontsize=9.5, color=rtxt,
weight="bold", zorder=6)
ax.text(0.60, -0.97, msg2, ha="center", va="center", fontsize=8.6, color=COL_TEXT,
family="monospace", zorder=6)
ax.text(0.60, 2.62, title, ha="center", va="center", fontsize=11, color=COL_TEXT,
weight="bold", zorder=6)
ax.set_xlim(-1.20, 2.95)
ax.set_ylim(-1.35, 2.85)
ax.set_aspect("equal")
ax.axis("off")
# ---- motor verisi + ASSERT (figür yalnız bunu çizer) ----
_cd_cyc_g = {1: [2], 2: [3], 3: [1], 4: [1]}
_cd_ac_g = {1: [2], 2: [3], 3: [], 4: [1]} # 3→1 kaldırılmış
_cd_cyc = find_cycle(_cd_cyc_g)
assert _cd_cyc == [1, 2, 3, 1], _cd_cyc
assert find_cycle(_cd_ac_g) is None
_cd_topo = topological_order(_cd_ac_g)
assert _cd_topo == [4, 1, 2, 3], _cd_topo
assert verify_topological(_cd_ac_g, _cd_topo) is True
assert _cd_cyc[0] == _cd_cyc[-1]
for _i in range(len(_cd_cyc) - 1):
assert _cd_cyc[_i + 1] in _cd_cyc_g[_cd_cyc[_i]]
fig, (ax_l, ax_r) = plt.subplots(1, 2, figsize=(11.0, 6.0))
fig.patch.set_facecolor(COL_WHITE)
_cd_panel(ax_l, edges=[(1, 2), (2, 3), (4, 1)], back_edge=(3, 1),
title="Geri kenar VAR — çevrim", is_cyclic=True, cycle_seq=_cd_cyc)
_cd_panel(ax_r, edges=[(1, 2), (2, 3), (4, 1)], back_edge=None,
title="Geri kenar YOK — DAG", is_cyclic=False, cycle_seq=None, topo=_cd_topo)
fig.suptitle(
"Çevrim tespiti: geri kenar (aktif yığındaki ataya kenar) = çevrim",
color=COL_TEXT, fontsize=13.5, weight="bold", y=0.975)
fig.text(0.5, 0.045,
"geri kenar VAR → çevrim (DAG değil, topolojik sıra yok) | "
"geri kenar YOK → DAG (ters bitiş sırası = topolojik sıra)",
ha="center", va="center", fontsize=9, color=COL_PRIMARY, weight="bold")
fig.text(0.5, 0.012,
"full DFS çevrim varsa bir v düğümünden atasına giden kenarı gezer "
"(Solomon 48:20)",
ha="center", va="center", fontsize=8.3, color=COL_SLATE_500, style="italic")
fig.subplots_adjust(left=0.02, right=0.98, top=0.90, bottom=0.13, wspace=0.10)
plt.show()
```
## Bu Dersin Özeti {#sec-bu-dersin-ozeti-d15}
1. **DFS** = özyinelemeli "derine in, geri çekil"; BFS eşmerkezli dairelerken DFS dışa fırlar.
2. **Erişilebilirlik**: ebeveyn ağacı $P(v)$ ile *bir* yol (en kısa değil) ver; ağaç (çevrimsiz).
3. **DFS doğruluğu**: uzaklık $k$ üzerinden tümevarım; $u$ ($k$) doğruysa $v$ ($k+1$) de doğru.
4. **Çalışma süresi**: DFS $O(E)$ (yalnız erişilebilir kenarlar); BFS $O(V + E)$ (başta $O(V)$ yer).
5. **Bağlı bileşenler**: full DFS, tüm düğümler üzerinde döngü → $O(V + E)$.
6. **DAG + topolojik sıralama**: $f(u) < f(v)$; benzersiz değil; **ters bitiş sırası** = topolojik sıra.
7. **Çevrim tespiti**: topolojik sıra $\iff$ DAG; geri kenar ($v \to$ atası) çevrimi verir.
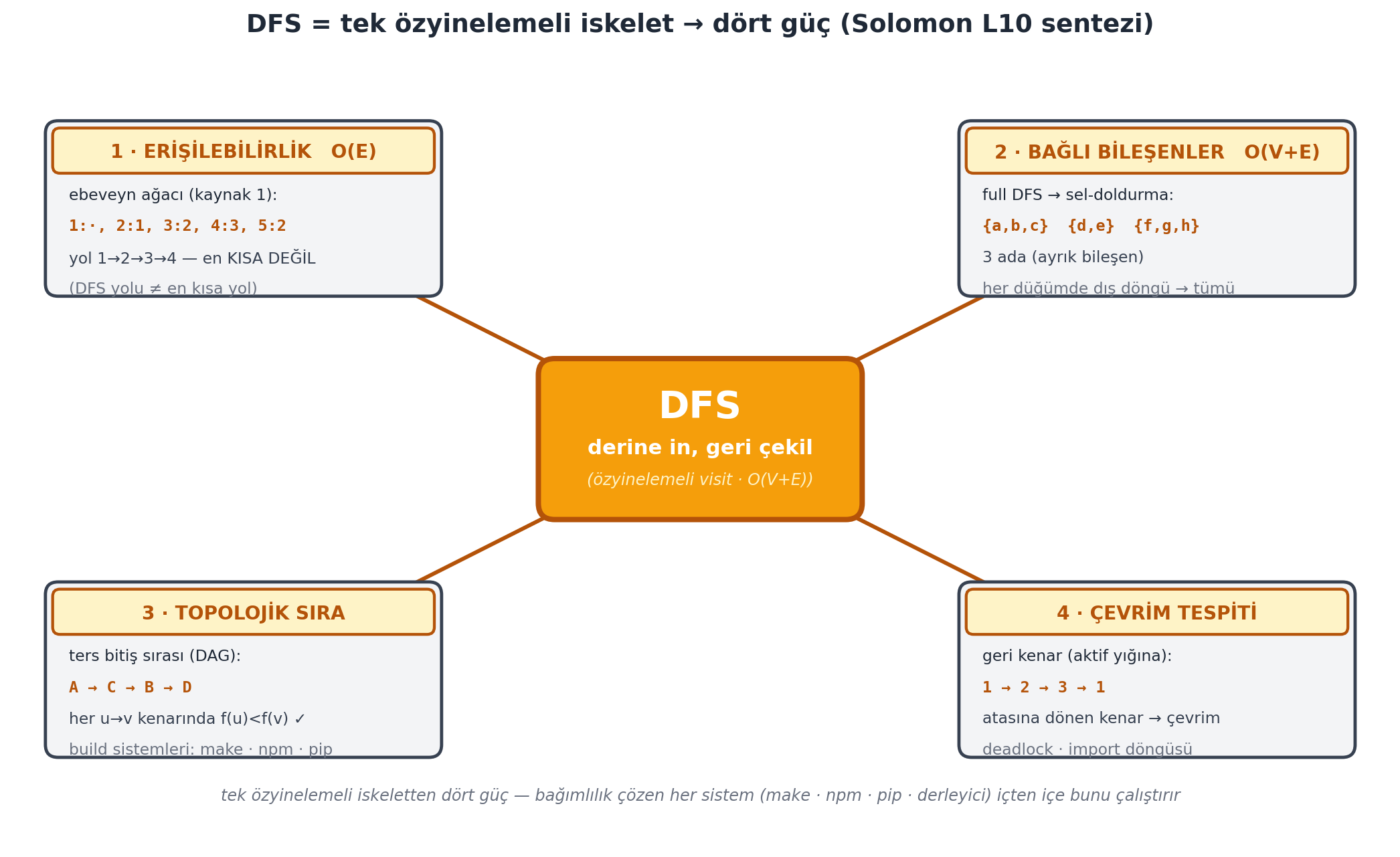
@fig-dfs-applications dersi tek bir sentez figüründe toplar: ortada **DFS** ($O(V+E)$ özyinelemeli iskelet), dört köşede dört güç — erişilebilirlik, bağlı bileşenler, topolojik sıra, çevrim tespiti — her biri motordan gelen bir mini sonuçla.
```{python}
#| label: fig-dfs-applications
#| fig-cap: "DFS = tek özyinelemeli iskelet → dört güç (L10 sentezi, İMZA figür). ORTADA büyük amber kutu: DFS — derine in, geri çekil (özyinelemeli visit, O(V+E)). Dört köşede uydu kutusu, merkezden oklarla bağlı, her biri motordan mini sonuç: (1) ERİŞİLEBİLİRLİK O(E) — ebeveyn ağacı (kaynak 1) {1:·, 2:1, 3:2, 4:3, 5:2}, yol 1→2→3→4 en KISA DEĞİL (DFS yolu ≠ en kısa yol). (2) BAĞLI BİLEŞENLER O(V+E) — full DFS sel-doldurma → {a,b,c} {d,e} {f,g,h}, 3 ada. (3) TOPOLOJİK SIRA — ters bitiş sırası (DAG) A→C→B→D, her u→v'de f(u)<f(v) ✓ (build sistemleri make·npm·pip). (4) ÇEVRİM TESPİTİ — geri kenar (aktif yığına) 1→2→3→1, atasına dönen kenar → çevrim (deadlock·import döngüsü). Bağımlılık çözen her sistem içten içe bunu çalıştırır. Veri MOTORDAN: dfs(build_dfs_example(),1)={1:None,2:1,3:2,4:3,5:2}; connected_components=[[a,b,c],[d,e],[f,g,h]]; topological_order(build_dag_example())=[A,C,B,D]; find_cycle({1:[2],2:[3],3:[1]})=[1,2,3,1]."
#| fig-width: 11.0
#| fig-height: 7.0
# fig-dfs-applications (L10 §3-10 SENTEZ): tek iskelet → dört güç.
# Veri MOTORDAN (dfs / connected_components / topological_order / find_cycle ...).
_DA_CC_EDGES = [("a", "b"), ("b", "c"), ("d", "e"), ("f", "g"), ("g", "h")]
# ---- motor verisi + ASSERT (figür yalnız bunu yazar) ----
_da_reach = build_dfs_example()
_da_parent = dfs(_da_reach, 1)
assert _da_parent == {1: None, 2: 1, 3: 2, 4: 3, 5: 2}, _da_parent
assert dfs_visit_order(_da_reach, 1)["order"] == [1, 2, 3, 4, 5]
_da_cc = make_undirected(_DA_CC_EDGES)
_da_comps = connected_components(_da_cc)
assert _da_comps == [["a", "b", "c"], ["d", "e"], ["f", "g", "h"]], _da_comps
_da_fp, _da_reps = full_dfs(_da_cc)
assert len(_da_reps) == 3, _da_reps
_da_dag = build_dag_example()
_da_topo = topological_order(_da_dag)
assert _da_topo == ["A", "C", "B", "D"], _da_topo
assert verify_topological(_da_dag, _da_topo) is True
assert list(reversed(finishing_order(_da_dag))) == _da_topo
_da_cyc = find_cycle({1: [2], 2: [3], 3: [1]})
assert _da_cyc == [1, 2, 3, 1], _da_cyc
assert find_cycle(_da_dag) is None
fig, ax = plt.subplots(figsize=(11.0, 7.0))
fig.patch.set_facecolor(COL_WHITE)
_da_cx, _da_cy = 0.0, 0.0
_da_core_w, _da_core_h = 3.5, 1.7
ax.add_patch(FancyBboxPatch(
(_da_cx - _da_core_w / 2, _da_cy - _da_core_h / 2), _da_core_w, _da_core_h,
boxstyle="round,pad=0.04,rounding_size=0.18",
fc=COL_ACCENT, ec=COL_AMBER_700, linewidth=3.0, zorder=5))
ax.text(_da_cx, _da_cy + 0.36, "DFS", ha="center", va="center", fontsize=21,
color=COL_WHITE, weight="bold", zorder=6)
ax.text(_da_cx, _da_cy - 0.10, "derine in, geri çekil", ha="center", va="center",
fontsize=11.5, color=COL_WHITE, weight="bold", zorder=6)
ax.text(_da_cx, _da_cy - 0.45, "(özyinelemeli visit · O(V+E))", ha="center",
va="center", fontsize=9, color=COL_AMBER_100, style="italic", zorder=6)
_da_sat_w, _da_sat_h = 4.30, 1.86
def _da_satellite(scx, scy, head, head_col, lines):
ax.add_patch(FancyBboxPatch(
(scx - _da_sat_w / 2, scy - _da_sat_h / 2), _da_sat_w, _da_sat_h,
boxstyle="round,pad=0.04,rounding_size=0.14",
fc=COL_BG, ec=COL_PRIMARY, linewidth=1.8, zorder=4))
ax.add_patch(FancyBboxPatch(
(scx - _da_sat_w / 2 + 0.06, scy + _da_sat_h / 2 - 0.52),
_da_sat_w - 0.12, 0.46, boxstyle="round,pad=0.02,rounding_size=0.08",
fc=COL_AMBER_100, ec=head_col, linewidth=1.6, zorder=5))
ax.text(scx, scy + _da_sat_h / 2 - 0.29, head, ha="center", va="center",
fontsize=10.5, color=head_col, weight="bold", zorder=6)
ly = scy + _da_sat_h / 2 - 0.78
for text, col, bold in lines:
ax.text(scx - _da_sat_w / 2 + 0.22, ly, text, ha="left", va="center",
fontsize=8.8, color=col, weight="bold" if bold else "normal",
family="monospace" if bold else None, zorder=6)
ly -= 0.345
ax.add_patch(FancyArrowPatch(
(_da_cx, _da_cy), (scx, scy), arrowstyle="-|>", mutation_scale=18,
color=COL_AMBER_700, linewidth=2.2, zorder=3, shrinkA=46, shrinkB=58))
_da_dx, _da_dy = 5.05, 2.55
_da_par_str = ", ".join(f"{v}:{('·' if p is None else p)}" for v, p in _da_parent.items())
_da_satellite(-_da_dx, _da_dy, "1 · ERİŞİLEBİLİRLİK O(E)", COL_AMBER_700,
[("ebeveyn ağacı (kaynak 1):", COL_TEXT, False),
(_da_par_str, COL_AMBER_700, True),
("yol 1→2→3→4 — en KISA DEĞİL", COL_PRIMARY, False),
("(DFS yolu ≠ en kısa yol)", COL_SLATE_500, False)])
_da_comp_str = " ".join("{" + ",".join(c) + "}" for c in _da_comps)
_da_satellite(_da_dx, _da_dy, "2 · BAĞLI BİLEŞENLER O(V+E)", COL_AMBER_700,
[("full DFS → sel-doldurma:", COL_TEXT, False),
(_da_comp_str, COL_AMBER_700, True),
(f"{len(_da_comps)} ada (ayrık bileşen)", COL_PRIMARY, False),
("her düğümde dış döngü → tümü", COL_SLATE_500, False)])
_da_topo_str = " → ".join(_da_topo)
_da_satellite(-_da_dx, -_da_dy, "3 · TOPOLOJİK SIRA", COL_AMBER_700,
[("ters bitiş sırası (DAG):", COL_TEXT, False),
(_da_topo_str, COL_AMBER_700, True),
("her u→v kenarında f(u)<f(v) ✓", COL_PRIMARY, False),
("build sistemleri: make · npm · pip", COL_SLATE_500, False)])
_da_cyc_str = " → ".join(str(v) for v in _da_cyc)
_da_satellite(_da_dx, -_da_dy, "4 · ÇEVRİM TESPİTİ", COL_AMBER_700,
[("geri kenar (aktif yığına):", COL_TEXT, False),
(_da_cyc_str, COL_AMBER_700, True),
("atasına dönen kenar → çevrim", COL_PRIMARY, False),
("deadlock · import döngüsü", COL_SLATE_500, False)])
fig.suptitle(
"DFS = tek özyinelemeli iskelet → dört güç (Solomon L10 sentezi)",
color=COL_TEXT, fontsize=14, weight="bold", y=0.975)
ax.text(0.0, -_da_dy - _da_sat_h / 2 - 0.46,
"tek özyinelemeli iskeletten dört güç — bağımlılık çözen her sistem "
"(make · npm · pip · derleyici) içten içe bunu çalıştırır",
ha="center", va="center", fontsize=9, color=COL_SLATE_500, style="italic", zorder=6)
ax.set_xlim(-_da_dx - _da_sat_w / 2 - 0.4, _da_dx + _da_sat_w / 2 + 0.4)
ax.set_ylim(-_da_dy - _da_sat_h / 2 - 1.0, _da_dy + _da_sat_h / 2 + 0.5)
ax.set_aspect("equal")
ax.axis("off")
plt.tight_layout()
plt.show()
```
::: {.callout-important title="Tek Bir Cümle"}
DFS, çizgeyi özyinelemeli olarak derinlemesine gezen tek bir iskelettir; ondan erişilebilirlik ($O(E)$), bağlı bileşenler ve topolojik sıralama/çevrim tespiti — hepsi $O(V + E)$ içinde — doğal olarak türer.
:::
## Kontrol Soruları {#sec-kontrol-sorulari-d15}
::: {.callout-note collapse="true" title="Soru 1: DFS ile BFS arasındaki temel davranış farkı nedir, ve neden DFS O(E) iken BFS O(V+E)?"}
**Cevap:**
BFS, kaynaktan dışa **katman katman** (seviye kümeleri) ilerler — bir seviye bitmeden sonrakine geçmez. DFS, bir dalda **olabildiğince derine** iner, tıkanınca geri çekilir. Süre farkı uygulamadan gelir: bu dersteki BFS başta $O(V)$ yer ayırdığı için (erişilemeyenler dahil) $O(V + E)$'dir; DFS yalnızca kaynaktan **erişilebilen** kenarlara dokunur, hiç erişilemeyen düğümü görmez, dolayısıyla $O(E)$. (full DFS ise tüm düğümler üzerinde döngü kurduğundan yine $O(V + E)$.)
:::
::: {.callout-note collapse="true" title="Soru 2: DFS'in ürettiği ebeveyn ağacı neden en kısa yolu vermez? Bir örnek ver."}
**Cevap:**
DFS, bir komşuya "ilk denk geldiği" sırada iner — bu sıra en kısa yolu izlemez. Çevrim çizgesi (halka) uç örnektir: kaynaktan komşu komşuyu özyinelemeli çağırınca son düğüme uzun bir zincirin arkasından varılır, oysa tek kenarla doğrudan gidilebilirdi. DFS o kısa kenarı seçmez. Bu yüzden ağırlıksız en kısa yol için **BFS** kullanılır; DFS yapısal sorular (DAG mı, bileşenler, sıra) içindir.
:::
::: {.callout-note collapse="true" title="Soru 3: “Ters bitiş sırası = topolojik sıralama” iddiasında, v'nin u'dan önce ziyaret edildiği durum neden çevrimsizliğe dayanır?"}
**Cevap:**
$u \to v$ kenarı var. $v$ önce ziyaret edildiyse, visit($v$) tamamlanmadan $u$'yu görür mü? Görmesi için $v$'den $u$'ya bir yol gerekir — ama $u \to v$ zaten var, $v \to \ldots \to u$ olsaydı bir **çevrim** oluşurdu. Çizge DAG (çevrimsiz) olduğundan bu imkânsız. O hâlde visit($v$), $u$'yu hiç görmeden tamamlanır; ters bitiş sırasında $u$, $v$'den önce gelir (Durum 1 ile aynı sonuç). Çevrimsizlik olmasaydı iddia çökerdi.
:::
::: {.callout-note collapse="true" title="Soru 4: Bir çizgenin DAG olup olmadığını ve (varsa) bir çevrimini nasıl bulursun?"}
**Cevap:**
full DFS ile ters bitiş sırasını hesapla; her kenar $f(u) < f(v)$ ilişkisine uyuyorsa çizge bir **DAG**'dır (topolojik sıralama var $\iff$ DAG). Bir kenar bu ilişkiyi bozuyorsa çizge DAG değildir → çevrim vardır. Çevrimi *bulmak* için DFS sırasında bir düğümden **atasına** giden bir kenar (geri kenar, back edge) ara; o geri kenar bulunduğu an, atadan o düğüme inen özyineleme zinciri + geri kenar bir çevrim oluşturur.
:::
## Egzersizler {#sec-egzersizler-d15}
**Egzersiz 1.** Verilen yönlü bir çizgede, belirli bir kaynaktan DFS gezinme sırasını ve ebeveyn ağacı $P$'yi elle çıkar; aynı çizgede BFS sırasıyla karşılaştır.
**Egzersiz 2.** Python'da özyinelemeli DFS'i (yukarıdaki `dfs`) yığın (stack) tabanlı **özyinelemesiz** bir sürüme dönüştür; çıktının ebeveyn ağacının aynı kaldığını doğrula.
**Egzersiz 3.** full DFS ile bir yönsüz çizgenin bağlı bileşen sayısını hesaplayan bir fonksiyon yaz; süresinin $O(V + E)$ olduğunu argümanla göster.
**Egzersiz 4.** Küçük bir DAG için tüm geçerli topolojik sıralamaları elle listele; ters bitiş sırasının bunlardan biri olduğunu doğrula.
**Egzersiz 5.** DFS'i, bir geri kenar (atası ziyarette olan bir komşu) bulduğunda çevrimi düğüm listesi olarak döndürecek şekilde genişlet.
## Sonraki Ders İçin Hazırlık {#sec-sonraki-ders-icin-hazirlik-d15}
::: {.callout-warning title="Sonraki: Ders 16 (L11) — Ağırlıklı En Kısa Yollar"}
**Ders 16 (L11): Ağırlıklı En Kısa Yollar** — Jason Ku ile, kenarlara **ağırlık** ekliyoruz: artık "en az kenar" değil, "en az toplam ağırlık" arıyoruz. BFS/DFS yetmez; ağırlıklar (hatta negatif ağırlıklar) yeni problemler doğurur. Bu, Bellman-Ford ve Dijkstra'ya giden kapının açılışıdır.
**Ders 16 Öncesi Yapılacak:**
- Bu dersin egzersizlerini, özellikle Egzersiz 3 (bağlı bileşenler) ve 4 (topolojik sıralama) çöz.
- DFS doğruluk kanıtını (uzaklık $k$ tümevarımı) ezberden anlat.
- Ana cümleyi tekrar oku: *"DFS tek iskelet; erişilebilirlik, bileşenler, topolojik sıra ondan türer."*
:::
## Anahtar Kavramlar (Cheat Sheet) {#sec-anahtar-kavramlar-d15}
| Kavram | Tanım | Sayfada |
|---|---|---|
| **DFS** | Özyinelemeli "derine in, geri çekil"; ebeveyn ağacı $P(v)$ | Böl. 1, 3 |
| **Erişilebilirlik** | $s$'den ulaşılan düğümler; $P$ ile bir yol (en kısa değil) | Böl. 2 |
| **DFS süresi** | $O(E)$ (yalnız erişilebilir kenarlar); full DFS $O(V + E)$ | Böl. 5, 7 |
| **Bağlı bileşen** | Yönsüz çizgede birbirinden erişilebilir küme; full DFS | Böl. 7 |
| **DAG** | Yönlü + çevrimsiz çizge | Böl. 8 |
| **Topolojik sıra** | $u \to v \Rightarrow f(u) < f(v)$; benzersiz değil | Böl. 8 |
| **Bitiş sırası** | visit tamamlanınca ekle; tersi = topolojik sıra | Böl. 9 |
| **Çevrim tespiti** | geri kenar ($v \to$ atası); topolojik sıra $\iff$ DAG | Böl. 10 |
## Builder ve OMSCS Bağlantıları {#sec-builder-ve-omscs-baglantilari-d15}
::: {.callout-tip title="6 köprü"}
Bu ders, "tek özyinelemeli iskelet (DFS), dört güç" sezgisini kurar — köprülerin özeti:
1. **Topolojik sıralama** → build sistemleri (`make`, Bazel), paket bağımlılığı (npm/pip), görev zamanlama: DAG'da çalıştırma sırası.
2. **Çevrim tespiti** → deadlock, import döngüsü, elektronik tablo formül döngüsü, derleyici bağımlılık grafı.
3. **Bağlı bileşenler** → kümeleme, sosyal ağ grupları, görüntü "flood fill", birlik-bul (union-find) alternatifi.
4. **DFS özyineleme** → ağaç/çizge gezme, geri izleme (backtracking) algoritmaları, ifade ağacı değerlendirme.
5. **Erişilebilirlik** → ulaşılabilir kod analizi (derleyici), çöp toplama (mark-and-sweep), bağımlılık kapanışı.
6. **$O(V + E)$ doğrusal** → seyreklik bilinci: gerçek çizgeler seyrek; bir gezinmede her kenara bir kez dokun.
:::
---
::: {.callout-important title="Tek bir şey alıp gideceksen"}
DFS, "derine in, geri çekil" diyen tek bir özyinelemeli iskelettir — ama o tek iskeletten erişilebilirlik ($O(E)$), bağlı bileşenler ($O(V + E)$), topolojik sıralama ve çevrim tespiti çıkar. Bağımlılık çözen her sistem (make, paket yöneticisi, derleyici) içten içe bunu çalıştırır.
:::