flowchart TB
M["Eyer noktalari + maxmin"]
M --> R["Rayleigh ornegi diag(5,3,1):<br/>maks 5, min 1, EYER 3"]
M --> V["degerler = ozdeger,<br/>yerler = ozvektor"]
M --> S["eyer tanimi:<br/>gradyan 0 + Hessian belirsiz"]
M --> C["maxmin (Courant-Fischer):<br/>lambda_k = max uzerinden min"]
C --> I["maxmin -> interlacing kaniti<br/>(Ders 15)"]
N["NYU koprusu: graf Laplacian /<br/>GCN / Fiedler lambda_2"]
P["covariance onizleme:<br/>simetrik PSD (Ders 20)"]
classDef center fill:#1f4e79,stroke:#163a5c,color:#ffffff,stroke-width:2px;
classDef branch fill:#2e75b6,stroke:#1f4e79,color:#ffffff,stroke-width:1px;
classDef side fill:#9dc3e6,stroke:#2e75b6,color:#11151c,stroke-width:1px;
class M center;
class R,V,S,C,I branch;
class N,P side;
20 Eyer Noktaları (Devam), Maxmin İlkesi
Courant-Fischer maxmin ilkesi, interlacing kanıtı ve covariance köprüsü
NotBölüm bilgisi
Video: MIT 18.065 — Saddle Points Continued, Maxmin Principle · OCW: Lecture 19 · Okuma süresi: ≈32 dk · Konuşmacı: Gilbert Strang · Önkoşul: Ders 18 (parametre sayımı, Rayleigh, eyer).
Ders 18’in eyer noktası fikrini tamamlıyoruz. Çekirdek: maxmin ilkesi (Courant-Fischer) — aradaki bir özdeğeri (eyer değeri) bir maks-min olarak yaz. Bu, Ders 15’in interlacing teoremini doğrudan kanıtlar. Dersin sonu istatistiğe (covariance) köprü kurar; lineer cebir bloğu kapanıyor, istatistik bloğu başlıyor.
20.1 Bu Derste Ne Var?
Bu ders Ders 18’in yarım kalan eyer tartışmasını kapatır ve dört sonuca yürür: önce somut bir Rayleigh örneğinde değerlerin nereden geldiğini görürüz, ardından her kritik noktanın bir özvektör (değeri bir özdeğer) olduğunu okuruz, sonra eyer değerini bir maks-min olarak yazan ilkeyi (Courant-Fischer) kurarız ve son olarak bu ilkeden interlacing kanıtının nasıl düştüğünü görürüz. Kapanışta covariance köprüsü açılır.
Dört sonuç:
- Rayleigh örneği: \(S = \mathrm{diag}(5, 3, 1)\) için \(R\)’nin maks = 5 (özdeğer \(\lambda_{1}\), özvektör \(e_{1}\)), min = 1 (\(\lambda_{3}\), \(e_{3}\)), eyer = 3 (\(\lambda_{2}\), \(e_{2}\)).
- Değerler = özdeğer, yerler = özvektör: Rayleigh’in tüm kritik noktaları özvektör, değerleri özdeğer.
- Maxmin ilkesi: \(\lambda_{k} = \max\) (boyut-\(k\) alt-uzaylar \(V\)) \(\min\) (\(x \in V\)) \(R(x)\). Eyeri maks-min’e çevirir.
- Interlacing kanıtı: maxmin’den, \(S\) perturbe edilince veya bir satır+sütun atılınca özdeğerlerin neden içiçe geçtiği düşer.
“…what happens if you have a saddle point or a degenerate minimum?” — Strang, 1:00 (derin öğrenme motivasyonu)
Kavram haritası (Şekil 20.1) dersin omurgasını gösterir: merkezde eyer noktaları ve maxmin ilkesi, dallarda Rayleigh örneği, özdeğer-özvektör okuması, eyer tanımı ve Courant-Fischer’dan interlacing’e giden kanıt; yan düğümlerde NYU GCN köprüsü ve covariance önizlemesi.
İpucuBuilder Notu — Eyerden Maks-Min’e
- Eyer noktaları = derin öğrenmenin merkezi: yüksek boyutlu kayıp yüzeyinde minimumdan çok eyer var; gradient descent’in (Ders 22) eyerlerden kaçışı başarının anahtarı.
- Maxmin (Courant-Fischer) — ara özdeğerleri optimizasyon diliyle tanımlar; spektral graf teorisinin (NYU paralel ders, GCN) temeli.
- \(\lambda_{2}\) = Fiedler değeri — graf bölmenin (spektral kümeleme, Ders 35) anahtarı; maxmin ile karakterize edilir.
- Geriye köprü: Ders 18 (Rayleigh, eyer, KKT), Ders 15 (interlacing), Ders 16 (Weyl), Ders 5 (pozitif tanımlı).
20.2 Eyer Noktaları Neden Önemli?
Strang neden eyer noktalarına bu kadar yer ayırdığını açıklar: derin öğrenmenin kalbi, toplam maliyet fonksiyonunun minimumunu gradient descent ile bulmaktır. Ama yüksek boyutta her şey minimum değildir.
“…what happens if you have a saddle point or a degenerate minimum?” — Strang, 1:00
Maksimum ve minimumu biliyoruz; eyer noktaları daha bulanık. Derin öğrenmenin anlaşılması giderek “gradient descent ne üretiyor, eyerlerde ne oluyor?” sorusuna odaklanıyor. Bu yüzden eyeri netleştirmek şart.
İpucuBuilder Notu — Kayıp Yüzeyinin Çoğu Eyer
Yüksek boyutlu kayıp yüzeylerinde kritik noktaların ezici çoğunluğu eyerdir — gerçek yerel minimum nadirdir. ML köprüsü: derin öğrenmenin “neden çalışıyor?” gizeminin büyük kısmı, SGD’nin (Ders 25) eyerlerden nasıl kaçtığıyla ilgili; eyer geometrisi optimizasyon teorisinin sıcak konusu.
20.3 Rayleigh Örneği: S = diag(5, 3, 1)
Somut örnek. Köşegen (dolayısıyla simetrik) bir matris al — her simetrik matris ortogonal değişkene dönüştürülebileceğinden genelliği kaybetmeyiz. \(x = (u, v, w)\), 3 boyut:
\[R(x) = \frac{x^{T}Sx}{x^{T}x} = \frac{5u^{2} + 3v^{2} + w^{2}}{u^{2} + v^{2} + w^{2}}\]
Üç soru: maks, min ve eyer. Maks = 5: tüm ağırlığı \(u\)’ya yükle, \(x = (1, 0, 0)\). Min = 1: her şeyi \(w\)’ye yükle, \(x = (0, 0, 1)\). Birinci türevlerin sıfır olduğu üçüncü bir nokta daha var mı? Evet:
\[\max R = 5\ \text{at}\ (1,0,0), \quad \min R = 1\ \text{at}\ (0,0,1), \quad \text{saddle } R = 3\ \text{at}\ (0,1,0)\]
Eyer değeri 3, orta noktada \((0, 1, 0)\).
İki düzlem kesiti bunu görselleştirir (Şekil 20.2): birim çemberi \((u,v,0)\) düzleminde gezdirirsen \(R\) değerleri \([3, 5]\) arasında salınır (5 ile 3’ün arası); \((0,v,w)\) düzleminde ise \([1, 3]\) arasında. Eyer değeri 3, iki düzlemin ORTAK değeridir — bir düzlemde maks, diğerinde min. İşte eyerin geometrik imzası budur.
Kod
th, puv, pvw = two_plane_sections(S19)
fig, ax = plt.subplots(figsize=(8, 4.2))
ax.plot(th, puv, color=COL_PRIMARY, lw=2, label="(u,v,0) düzlemi: 5 ile 3 arası")
ax.plot(th, pvw, color=COL_VEC3, lw=2, label="(0,v,w) düzlemi: 3 ile 1 arası")
ax.axhline(5, color=COL_STEEL_300, ls="--", lw=1.2)
ax.axhline(1, color=COL_STEEL_300, ls="--", lw=1.2)
ax.axhline(3, color=COL_TEAL, ls="--", lw=1.8, label="eyer = 3: iki düzlemin ORTAK değeri")
ax.set_xlabel("theta (birim çember)")
ax.set_ylabel("R(x)")
ax.legend()
ax.set_title("Rayleigh iki düzlemde: (u,v) kesiti [3,5], (v,w) kesiti [1,3] — eyer 3 ikisinin kesişimi")
apply_style(ax)
plt.show()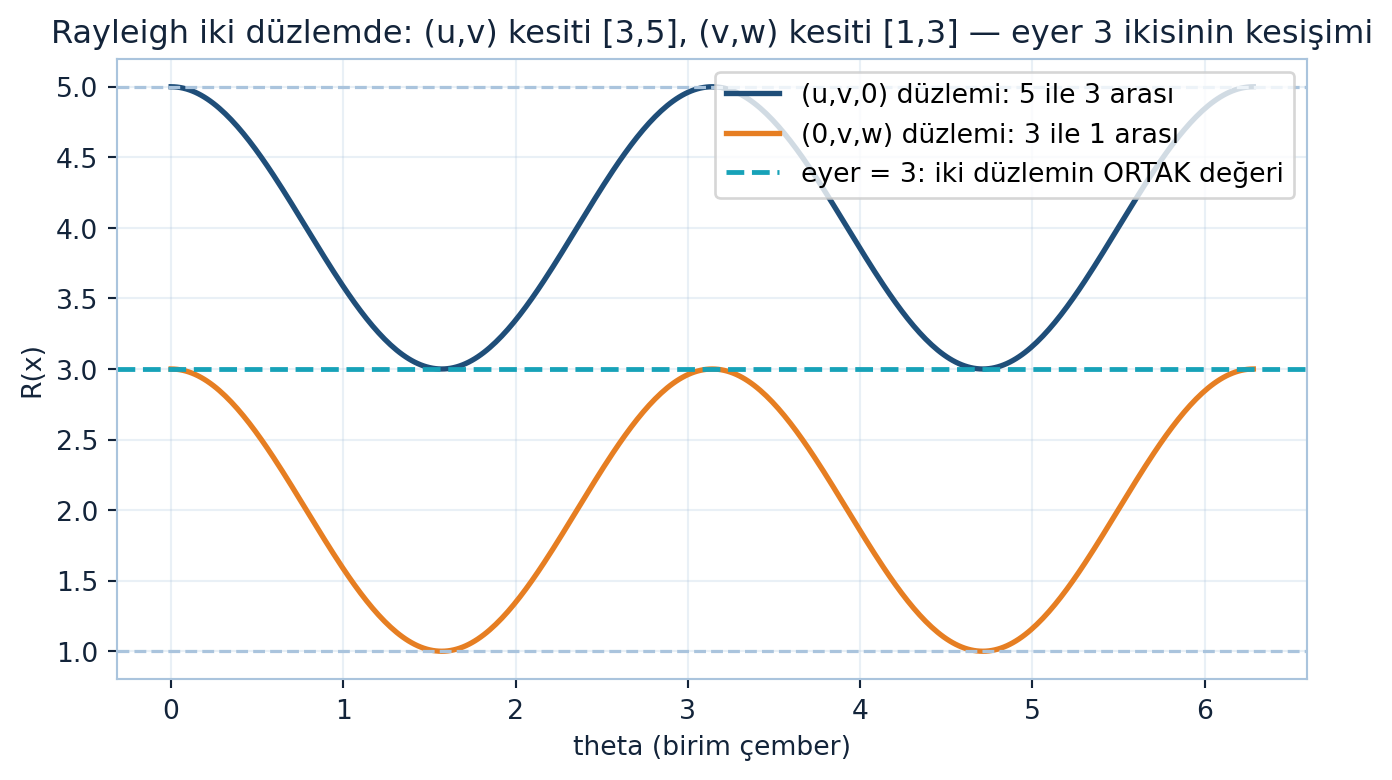
İpucuBuilder Notu — Önce Köşegenleştir Sonra Oku
Rayleigh bölümünü köşegen \(S\) ile incelemek tüm genelliği korur (Ders 18): herhangi simetrik \(S\), ortogonal bir değişken dönüşümüyle köşegen hâle gelir, \(R\)’nin maks/min/eyer yapısı değişmez. Bu “önce köşegenleştir, sonra oku” stratejisi spektral analizin standart ilk hamlesidir.
20.4 Değerler = Özdeğer, Yerler = Özvektör
Rayleigh bölümünün kritik noktalarının (birinci türevin sıfır olduğu yerler) tümü \(S\)’nin özvektörleridir; oradaki değerler özdeğerlerdir:
“The values there are the eigenvalues. And the places where you reach them are the eigenvectors.” — Strang, 7:38
Örnekte: maks 5 = \(\lambda_{1}\) (\(e_{1}\)), min 1 = \(\lambda_{3}\) (\(e_{3}\)), eyer 3 = \(\lambda_{2}\) (\(e_{2}\)). Rayleigh karmaşık bir fonksiyon (türevi için bölüm kuralı veya Lagrange çarpanı gerek), ama sonucu kusursuz: değerler özdeğer, yerler özvektör. Pratik not: en büyük ve en küçük özvektörü hesaplamak, aradaki (eyer) özvektörleri hesaplamaktan genelde çok daha kolaydır.
İki düzlem kesiti (Şekil 20.2) bunu da gösterir: tepe değer 5 ile dip değer 1, eğrilerin uç noktalarında (özvektör doğrultularında) okunur; eyer değeri 3 ise iki düzlemin ortak noktasıdır.
İpucuBuilder Notu — Uçlar Kolay Ara Zor
“Uç özdeğerler kolay, ara özdeğerler zor” gerçeği sayısal lineer cebirin temel asimetrisidir: power iteration en büyüğü bulur, ama \(\lambda_{2}\)’yi (Fiedler) bulmak deflation/Lanczos ister. ML köprüsü: spektral kümeleme (Ders 35) tam da \(\lambda_{2}\) özvektörüne (Fiedler vektörü) ihtiyaç duyar — bu yüzden iyi kodlar ve dikkat gerektirir.
20.5 Eyer = Gradyan 0, Hessian Belirsiz
Eyer noktası iki koşulla tanımlanır. (1) Birinci türevler (gradyan vektörü) sıfır:
\[\nabla R = \left(\frac{\partial R}{\partial u}, \frac{\partial R}{\partial v}, \frac{\partial R}{\partial w}\right) = 0\]
- İkinci türevler — \(3\times 3\) bir matris (Hessian). Karışık türevler eşit olduğundan (\(\partial^{2}R/\partial u\,\partial v = \partial^{2}R/\partial v\,\partial u\)) bu matris simetrik:
\[H = \begin{bmatrix} R_{uu} & R_{uv} & R_{uw} \\ R_{vu} & R_{vv} & R_{vw} \\ R_{wu} & R_{wv} & R_{ww} \end{bmatrix}\]
Maksimumda \(H\) negatif tanımlı, minimumda pozitif tanımlı, eyerde belirsiz (karışık işaretli özdeğerler) — bazı yönlerde yukarı, bazılarında aşağı.
Üç kritik noktada sayısal Hessian’ı (merkez fark) hesaplayıp özdeğerlerine bakınca işaret deseni netleşir (Şekil 20.3): maks \(q_{1}\)’de \([-8, -4, 0] \leq 0\) (negatif-tanımlı), min \(q_{3}\)’te \([0, 4, 8] \geq 0\) (pozitif-tanımlı), eyer \(q_{2}\)’de ise \([-4, 0, +4]\) — işaretler karışık. Buradaki 0 özdeğer radyal yöndendir: \(R\) ölçekten bağımsız (0-homojen) olduğundan o yönde değişmez. Sınıflandırmayı yapan tam da bu işaret desenidir.
Kod
H1 = rayleigh_hessian_numeric(S19, np.array([1., 0., 0.]))
H2 = rayleigh_hessian_numeric(S19, np.array([0., 1., 0.]))
H3 = rayleigh_hessian_numeric(S19, np.array([0., 0., 1.]))
eig1 = np.sort(np.linalg.eigvalsh(H1))
eig2 = np.sort(np.linalg.eigvalsh(H2))
eig3 = np.sort(np.linalg.eigvalsh(H3))
fig, axes = plt.subplots(1, 3, figsize=(10, 3.6))
panels = [
(axes[0], eig1, "q1 (maks): [-8, -4, 0] <= 0"),
(axes[1], eig2, "q2 (EYER): [-4, 0, +4] KARISIK"),
(axes[2], eig3, "q3 (min): [0, 4, 8] >= 0"),
]
for ax, eig, title in panels:
cols = []
for v in eig:
if abs(v) < 1e-3:
cols.append(COL_STEEL_300)
elif v > 0:
cols.append(COL_PRIMARY)
else:
cols.append(COL_VEC3)
xpos = np.arange(len(eig))
ax.bar(xpos, eig, color=cols, edgecolor=COL_TEXT, linewidth=0.7, width=0.6)
ax.axhline(0.0, color=COL_TEXT, linewidth=0.9)
ax.set_xticks(xpos)
ax.set_xticklabels(["ozdeger 1", "ozdeger 2", "ozdeger 3"], fontsize=8)
ax.set_ylim(-9.5, 9.5)
ax.set_title(title, color=COL_TEXT, fontsize=10, fontweight="bold")
for x, v in zip(xpos, eig):
off = 0.5 if v >= 0 else -0.5
va = "bottom" if v >= 0 else "top"
ax.text(x, v + off, "{:.0f}".format(v), ha="center", va=va, color=COL_TEXT, fontsize=9, fontweight="bold")
apply_style(ax)
axes[0].set_ylabel("Hessian ozdegeri", color=COL_TEXT)
fig.suptitle("Hessian kritik noktayi siniflar: maks negatif-tanimli, min pozitif-tanimli, EYER belirsiz (0 = radyal yon, R olcekten bagimsiz)", fontsize=10.5, color=COL_TEXT)
fig.tight_layout(rect=[0, 0, 1, 0.94])
plt.show()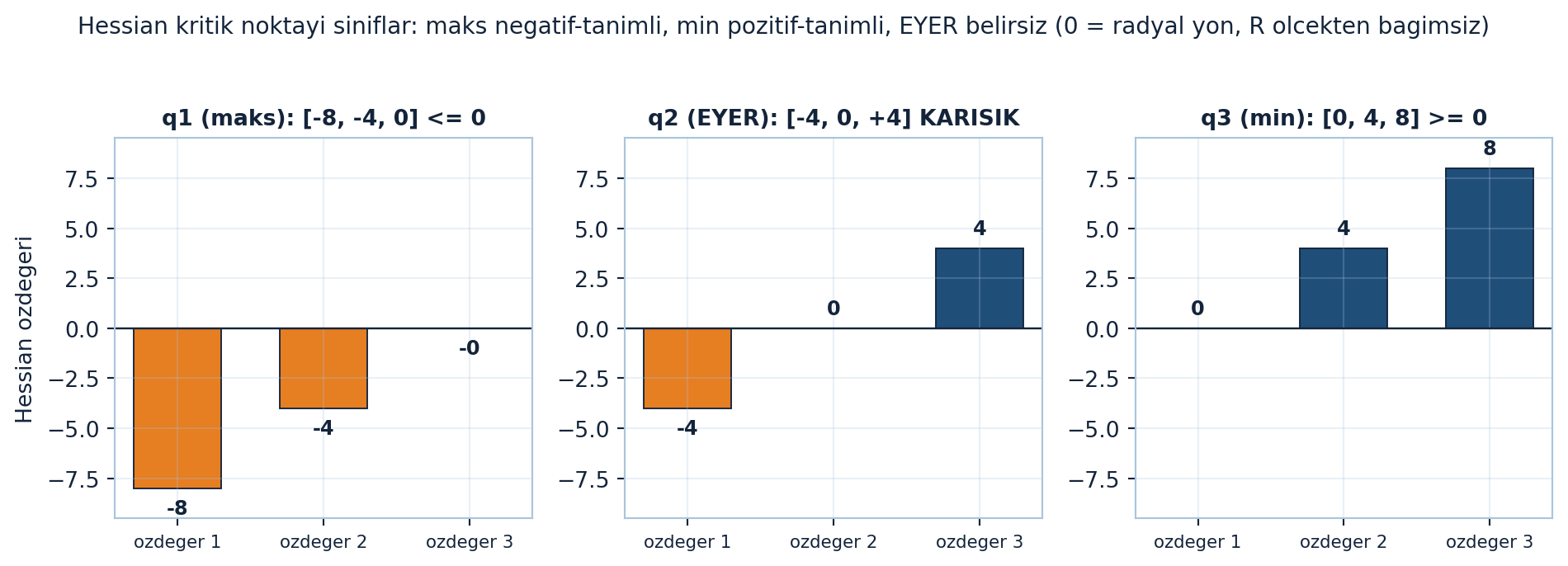
İpucuBuilder Notu — İşaretler Kritik Noktayı Sınıflar
Hessian’ın tanımlılığı bir kritik noktayı sınıflar: pozitif tanımlı = minimum, negatif tanımlı = maksimum, belirsiz = eyer (Ders 5 + Ders 18 pivot/atalet testi). ML köprüsü: ikinci-derece optimizasyon (Newton) ve eyer-kaçış yöntemleri Hessian’ın özdeğer işaretlerine bakar; derin ağ eğitiminde negatif eğrilik (negative curvature) yönleri eyerden çıkış kapısıdır.
20.6 Maxmin İlkesi (Courant-Fischer)
Eyer için en güzel fikir: onu bir maksimum-minimum olarak yaz, böylece maks/min’in kolaylığına geri dön.
“…write it as the maximum of a minimum.” — Strang, 10:38
İkinci özdeğer \(\lambda_{2}\) için: tüm 2-boyutlu alt-uzaylar \(V\) üzerinde, her \(V\) içinde Rayleigh’in minimumunu al, sonra bu minimumların maksimumunu al:
\[\lambda_{2} = \max_{\dim V = 2}\ \min_{0 \neq x \in V}\ R(x)\]
Genel hâli (Courant-Fischer): \(k\)’inci özdeğer, boyut-\(k\) alt-uzaylar üzerinde maks-min:
\[\lambda_{k} = \max_{\dim V = k}\ \min_{0 \neq x \in V}\ \frac{x^{T}Sx}{x^{T}x}\]
“…I’m going to take a maximum over two dimensional spaces…” — Strang, 12:08
Bu, sayısal olarak doğrudan doğrulanabilir (Şekil 20.5): 2000 rastgele 2B alt-uzayda Rayleigh’in minimumu hesaplanır; hepsi \(\lambda_{2} = 3\)’ün altında kalır (max-of-mins 2.999999) ve eşitlik yalnız özvektör uzayında (\(\mathrm{span}\{q_{1}, q_{2}\}\)) sağlanır. Aynı ilkenin ayna ikizi minimax’tır (Şekil 20.4, Egz4): \(n-k+1\) boyutlu rastgele uzayların TÜM max değerleri \(\lambda_{2} = 3\)’ün üstünde (min-of-maxs 3.000012); kazanan \(\mathrm{span}\{q_{2}, q_{3}\}\) tam 3.0 verir.
Kod
maxs, lam2b, winner_mm = minimax_experiment(S19, k=2, trials=2000)
fig, ax = plt.subplots(figsize=(7, 4))
ax.hist(maxs, bins=60, color=COL_ACCENT, alpha=0.9)
ax.axvline(3.0, color=COL_VEC3, linewidth=2.6)
ax.annotate("lambda_2 = 3 (hicbir V altina inemez)", xy=(3.0, ax.get_ylim()[1] * 0.92),
xytext=(3.15, ax.get_ylim()[1] * 0.92), color=COL_VEC3, fontsize=9, fontweight="bold", va="center")
ax.annotate("kazanan: span{q2,q3} -> max = 3.0", xy=(3.0, ax.get_ylim()[1] * 0.55),
xytext=(3.15, ax.get_ylim()[1] * 0.55), color=COL_PRIMARY, fontsize=9,
arrowprops=dict(arrowstyle="->", color=COL_PRIMARY), va="center")
ax.set_xlabel("max R (V icinde)")
ax.set_ylabel("frekans")
ax.set_title("Minimax ikizi (Egz4): rastgele uzaylarin TUM max degerleri 3 un ustunde\n"
"(min-of-maxs 3.000012) — maxmin in ayna simetrisi", fontsize=10)
apply_style(ax)
fig.tight_layout()
plt.show()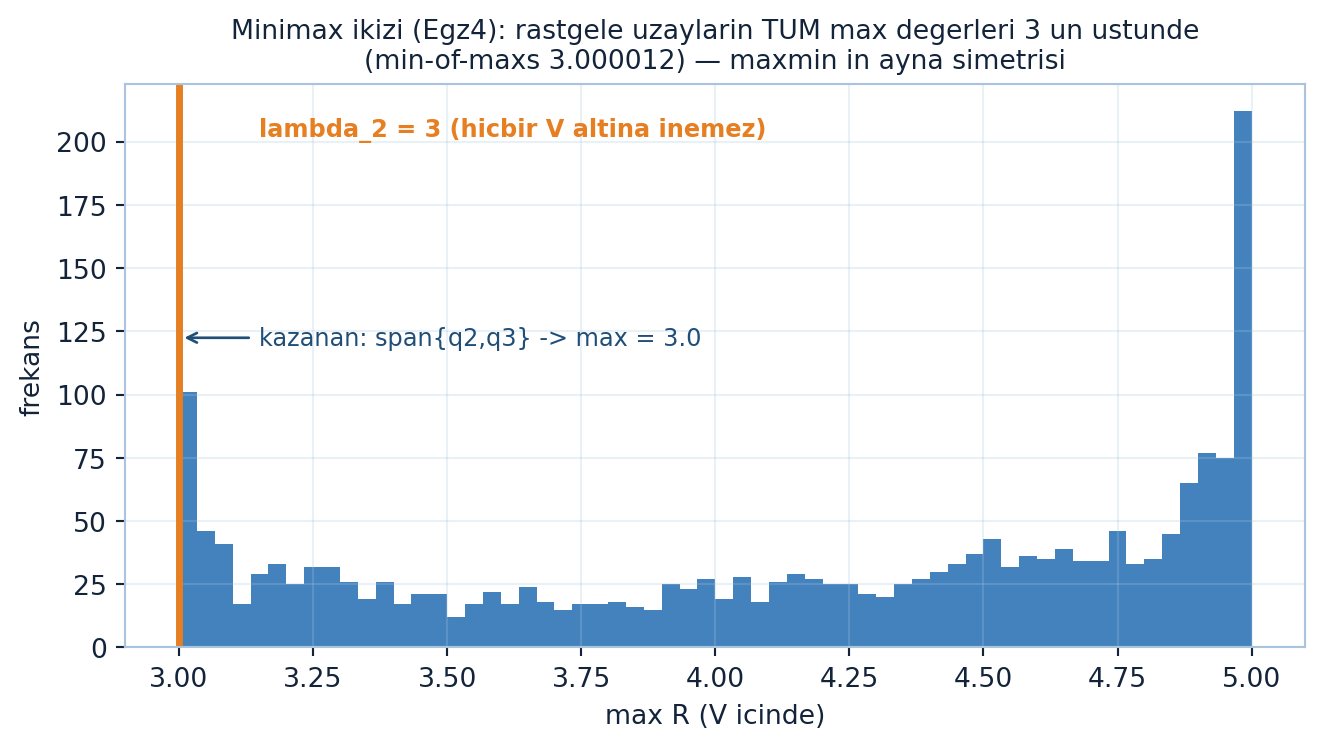
İpucuBuilder Notu — Zoru İki Kolaya Böl
Maxmin, eyer noktasını (zor) iki kolay işlemin (min, sonra maks) bileşimine indirger — optimizasyonun klasik “minimax” yapısı (Ders 24 oyun teorisi/LP ile akraba). ML köprüsü: GAN’lar (üretici-ayırıcı) tam bir minimax problemidir; robust optimizasyon, adversarial eğitim hep maks-min/min-maks dengesi arar. Courant-Fischer bu yapının spektral kökenidir.
20.7 Örnek Hesap: λ₂ = 3
İlkeyi örnekte çalıştır (\(S = \mathrm{diag}(5, 3, 1)\), \(\lambda_{2} = 3\) bekliyoruz). \(V = \mathrm{span}\{e_{1}, e_{2}\}\) al, yani \((u, v, 0)\) vektörleri (\(w = 0\)). Bu 2B uzayda Rayleigh:
\[R = \frac{5u^{2} + 3v^{2}}{u^{2} + v^{2}} \;\Rightarrow\; \min = 3 \ (\text{tum agirlik } v)\]
Bu \(V\) için min = 3. Şimdi maks: başka bir \(V\) denersek, örn. \(\mathrm{span}\{e_{2}, e_{3}\} = (0, v, w)\) vektörleri:
\[R = \frac{3v^{2} + w^{2}}{v^{2} + w^{2}} \;\Rightarrow\; \min = 1\]
Bu \(V\)’nin minimumu 1 — daha küçük, kazanan değil. Tüm 2B uzaylar üzerinde minimumların maksimumu 3’tür (en iyi seçim \(\mathrm{span}\{e_{1}, e_{2}\}\)). Yani $_{2} = $ max-min \(= 3\). ✓
Sayısal deney bunu tam onaylar (Şekil 20.5): solda 2000 rastgele 2B alt-uzayın min’leri histogramda hep \(\lambda_{2} = 3\)’ün altında toplanır (hiçbir \(V\) geçemez); sağda iki örnek \(V\) — \(\mathrm{span}\{e_{1}, e_{2}\}\) min = 3 (kazanan) ile \(\mathrm{span}\{e_{2}, e_{3}\}\) min = 1 karşılaştırılır.
Kod
fig, (axL, axR) = plt.subplots(1, 2, figsize=(10, 4.2))
# --- Sol: maxmin deneyi histogramı ---
mins, lam2, winner = maxmin_experiment(S19, k=2, trials=2000)
axL.hist(mins, bins=60, color=COL_PRIMARY, alpha=0.9)
axL.axvline(3.0, color=COL_VEC3, linewidth=3.0,
label="lambda_2 = 3 (hicbir V gecemez)")
axL.annotate("kazanan: span{q1,q2} -> min = 3.0 birebir",
xy=(winner, 0.0), xytext=(0.30, 0.82), textcoords="axes fraction",
fontsize=9, color=COL_TEXT,
arrowprops=dict(arrowstyle="->", color=COL_TEAL, lw=1.4))
axL.set_xlabel("min R (V icinde)")
axL.set_ylabel("frekans (2000 rastgele 2B alt-uzay)")
axL.legend(loc="upper left", fontsize=8)
apply_style(axL)
# --- Sag: iki ornek V bar ---
v_e12 = subspace_min(S19, np.eye(3)[:, :2]) # span{e1,e2} -> 3
v_e23 = subspace_min(S19, np.eye(3)[:, 1:]) # span{e2,e3} -> 1
xs = [0, 1]
axR.bar(xs[0], v_e12, width=0.55, color=COL_PRIMARY, label="span{e1,e2}")
axR.bar(xs[1], v_e23, width=0.55, color=COL_ACCENT, label="span{e2,e3}")
axR.axhline(3.0, color=COL_VEC3, linewidth=2.0, linestyle="--",
label="lambda_2 = 3")
axR.set_xticks(xs)
axR.set_xticklabels(["span{e1,e2}", "span{e2,e3}"])
axR.set_ylabel("min R (V icinde)")
axR.legend(loc="upper right", fontsize=8)
apply_style(axR)
fig.suptitle("Courant-Fischer SAYISAL KANIT: 2000 rastgele alt-uzayin TUM min leri "
"lambda_2 = 3 un altinda (max-of-mins 2.999999); esitlik yalniz ozvektor uzayinda",
fontsize=9, color=COL_TEXT)
fig.tight_layout(rect=[0, 0, 1, 0.94])
plt.show()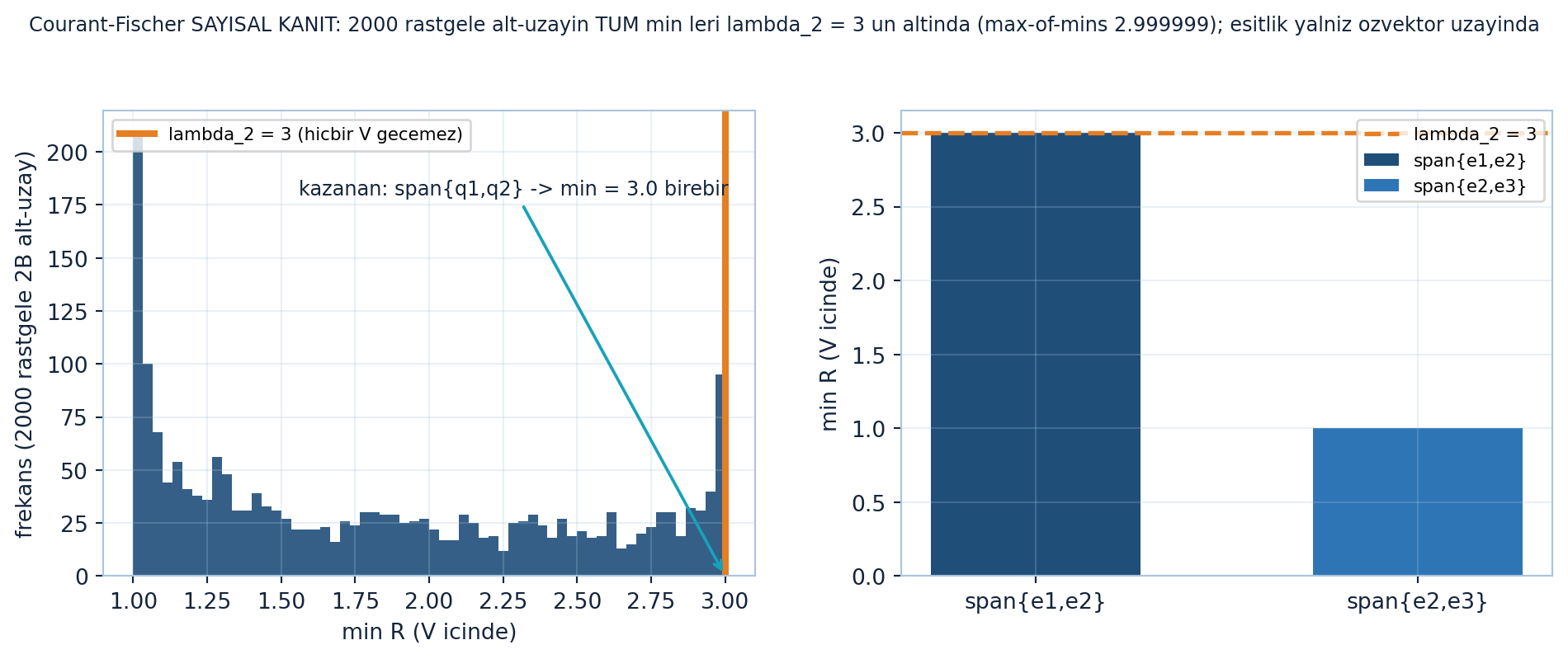
İpucuBuilder Notu — Kazanan Alt-Uzay Özvektörlerin
“Doğru alt-uzayı seç, minimumu maksimize et” hesabı, maxmin’in neden tam \(\lambda_{2}\)’yi verdiğini somutlaştırır: en iyi 2B uzay, ilk iki özvektörün gerdiği uzaydır ve oradaki min tam \(\lambda_{2}\)’dir. ML köprüsü: bu, PCA’nın “en iyi \(k\)-boyutlu alt-uzay” karakterizasyonunun (Ders 7 Eckart-Young) özdeğer ikizidir — alt-uzay optimizasyonu ve spektral gömme aynı maxmin iskeletini paylaşır.
20.8 Maxmin → Interlacing Kanıtı
Maxmin ilkesi sadece şık bir tanım değil — Ders 15’in interlacing teoremini doğrudan üretir:
“…would lead you… very quickly to the interlacing theorem…” — Strang, 11:31
Sezgi: \(\lambda_{k} = \max_{\dim V = k} \min_{x\in V} R(x)\). Şimdi \(S\)’yi perturbe et (rank-1 ekle) veya bir satır+sütun at (alt-matris, Ders 15). Kısıtlama, alt-uzay seçim havuzunu daraltır veya genişletir; ama maks-min bir adım kayar. Örneğin bir satır+sütun atmak, alt-uzayları bir boyut daha kısıtlar — yeni \(\lambda\)’lar eski \(\lambda\)’ların arasına sıkışır:
\[\lambda_{k}(S) \geq \mu_{k}(S_{n-1}) \geq \lambda_{k+1}(S)\]
Çünkü min-üzerinden-max yapısında bir kısıt eklemek değeri ne çok yukarı ne çok aşağı oynatabilir — tam interlacing. Ders 16’nın Weyl eşitsizliği de aynı maxmin makinesinden gelir.
Sayı doğrusu üzerinde bu içiçe geçiş açıkça görünür (Şekil 20.6): \(4\times 4\) rastgele simetrik bir \(S\) için özdeğerler \(\lambda = [2.886, 0.927, -0.812, -1.341]\), son satır+sütun atılınca elde edilen \(3\times 3\) alt-matrisin özdeğerleri \(\mu = [2.886, 0.311, -1.146]\) — her \(\mu_{k}\) tam olarak \(\lambda_{k}\) ile \(\lambda_{k+1}\) arasına sıkışır. 50 rastgele matriste ihlal sayısı 0.
Kod
rng = np.random.default_rng(3)
B = rng.standard_normal((4, 4)); S4 = (B + B.T) / 2
lam, mu, okc = interlace_submatrix(S4)
fig, ax = plt.subplots(figsize=(8, 3.4))
# gri ince kesik dikey baglar: her mu_k, lambda_k ve lambda_{k+1} arasina sikisir
for k in range(len(mu)):
ax.plot([lam[k], lam[k]], [0, 1], color=COL_STEEL_300, ls="--", lw=0.8, zorder=1)
ax.plot([lam[k + 1], lam[k + 1]], [0, 1], color=COL_STEEL_300, ls="--", lw=0.8, zorder=1)
ax.plot([mu[k], mu[k]], [0, 1], color=COL_STEEL_300, ls="--", lw=0.8, zorder=1)
# lambda (S): y=1, navy yuvarlak
ax.scatter(lam, np.ones_like(lam), s=80, color=COL_PRIMARY, marker="o", zorder=3,
edgecolors=COL_WHITE, linewidths=0.8)
for v in lam:
ax.annotate(f"{v:.3f}", (v, 1), textcoords="offset points", xytext=(0, 9),
ha="center", fontsize=8, color=COL_TEXT)
# mu (satir+sutun atilmis): y=0, steel kare
ax.scatter(mu, np.zeros_like(mu), s=80, color=COL_ACCENT, marker="s", zorder=3,
edgecolors=COL_WHITE, linewidths=0.8)
for v in mu:
ax.annotate(f"{v:.3f}", (v, 0), textcoords="offset points", xytext=(0, -16),
ha="center", fontsize=8, color=COL_TEXT)
ax.set_ylim(-0.5, 1.5)
ax.set_yticks([0, 1])
ax.set_yticklabels(["mu (satir+sutun atilmis)", "lambda (S)"])
ax.set_title("Maxmin -> interlacing: mu lar lambda larin ARASINA sikisir "
"(lambda_k >= mu_k >= lambda_k+1) — 50 rastgele matriste ihlal 0",
fontsize=9.5)
apply_style(ax)
plt.show()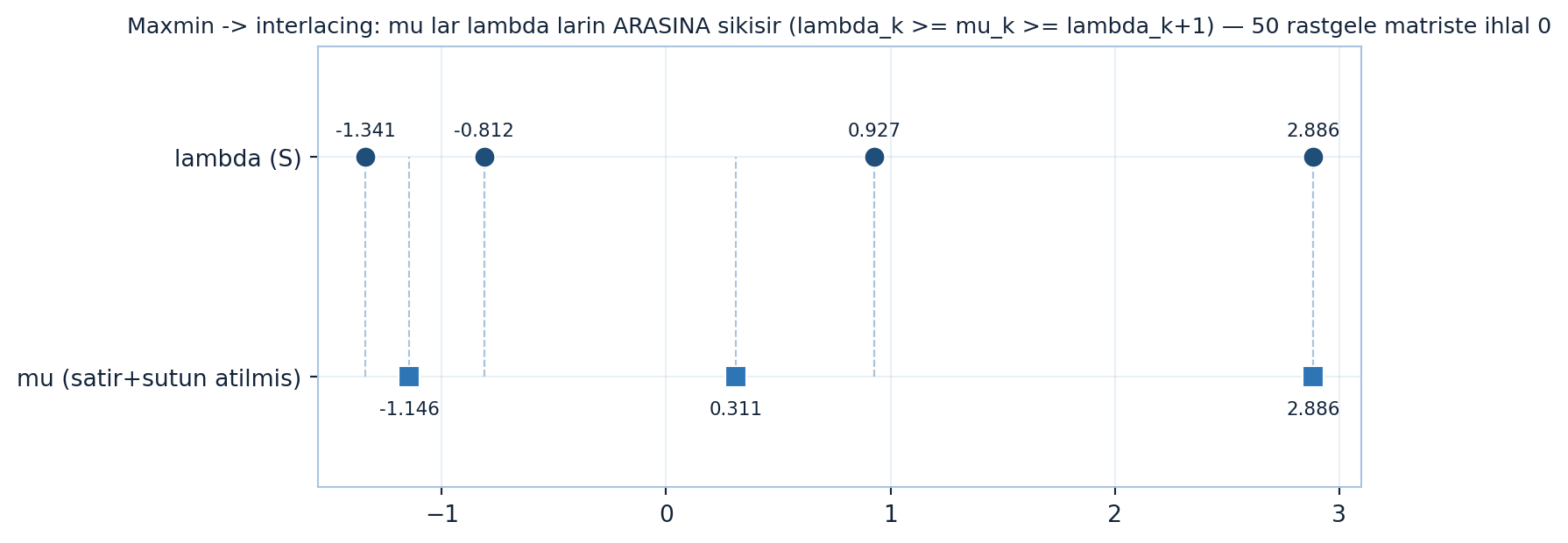
İpucuBuilder Notu — Bir İlke İki Teorem
Maxmin’in interlacing’i “ücretsiz” üretmesi, doğru soyutlamanın gücüdür: tek bir ilke (Courant-Fischer) hem özdeğer tanımını hem perturbasyon teoremlerini verir. ML köprüsü: NYU paralel dersinin spektral graf evrişim ağları (GCN), graf Laplacian’ının özdeğerlerini kullanır; bu özdeğerler maxmin ile tanımlanır ve graf değişince (kenar ekle/çıkar) interlacing onların nasıl kayacağını sınırlar — dinamik/gürültülü graflarda GCN kararlılığının teorik temeli. NYU H13 GCN (konuk Bresson): graf Laplacian özdeğerleri maxmin ile tanımlanır; \(\lambda_{2}\) = Fiedler değeri spektral kümelemenin anahtarı; interlacing dinamik graflarda spektrum kararlılığını sınırlar.
20.9 Covariance Önizlemesi (Ders 20 Köprüsü)
Strang dersin sonunda yeni konuya — istatistik ve covariance matrisine — köprü kurar. Mean ve variance bilinen kavramlar; sıradaki adım covariance (değişkenler arası ilişki). Anahtar gerçek:
“…that covariance matrix… will be symmetric positive definite, or semidefinite.” — Strang, 51:36
Covariance matrisi her zaman simetrik ve pozitif yarı-tanımlıdır (Ders 5). Yarı-tanımlı (tekil) durum, değişkenler tam bağımlı olduğunda ortaya çıkar (Strang’ın benzetmesiyle: “birbirine yapıştırılmış paralar”). Bağımsız değişkenlerde köşegen, bağımlılıkta köşegen-dışı terimler dolar.
Bunu iki örnek gösterir (Şekil 20.7): solda bağımsız değişkenlerde covariance tam-rank PSD’dir (özdeğerler \([0.53, 1.95]\)), elips iki yöne de açılır; sağda “yapıştırılmış paralar” (\(y = 2x\)) tam bağımlılığında covariance TEKİL olur (\(\lambda_{\min} = 0\)), elips bir doğruya çöker — \(C = \begin{bmatrix} v & 2v \\ 2v & 4v \end{bmatrix}\) yapısı tam bağımlılığı kodlar.
Kod
X_ind, C_ind, X_dep, C_dep = covariance_demo()
fig, (axL, axR) = plt.subplots(1, 2, figsize=(10, 4))
# Sol: bağımsız değişkenler — cov TAM-RANK
axL.scatter(X_ind[:, 0], X_ind[:, 1], s=8, color=COL_STEEL_300, alpha=0.7)
lam, Q = np.linalg.eigh(C_ind)
theta = np.linspace(0, 2 * np.pi, 100)
ell = Q @ np.diag(2 * np.sqrt(lam)) @ np.vstack([np.cos(theta), np.sin(theta)])
mu = X_ind.mean(axis=0)
axL.plot(ell[0] + mu[0], ell[1] + mu[1], color=COL_PRIMARY, lw=2)
axL.set_title("bağımsız: cov TAM-RANK (lambda [0.53, 1.95])", color=COL_TEXT, fontsize=11, fontweight="bold")
axL.set_aspect("equal")
apply_style(axL)
# Sağ: yapıştırılmış paralar (y = 2x) — cov TEKİL
axR.scatter(X_dep[:, 0], X_dep[:, 1], s=8, color=COL_VEC3, alpha=0.7)
xs = np.array([X_dep[:, 0].min(), X_dep[:, 0].max()])
axR.plot(xs, 2 * xs, color=COL_PRIMARY, lw=1)
axR.set_title("yapıştırılmış paralar (y = 2x): cov TEKIL (lambda_min = 0)", color=COL_TEXT, fontsize=11, fontweight="bold")
apply_style(axR)
fig.suptitle("Covariance önizlemesi (Ders 20 köprüsü): her cov simetrik PSD; tam bağımlılık = tekil durum",
color=COL_TEXT, fontsize=12, fontweight="bold")
plt.show()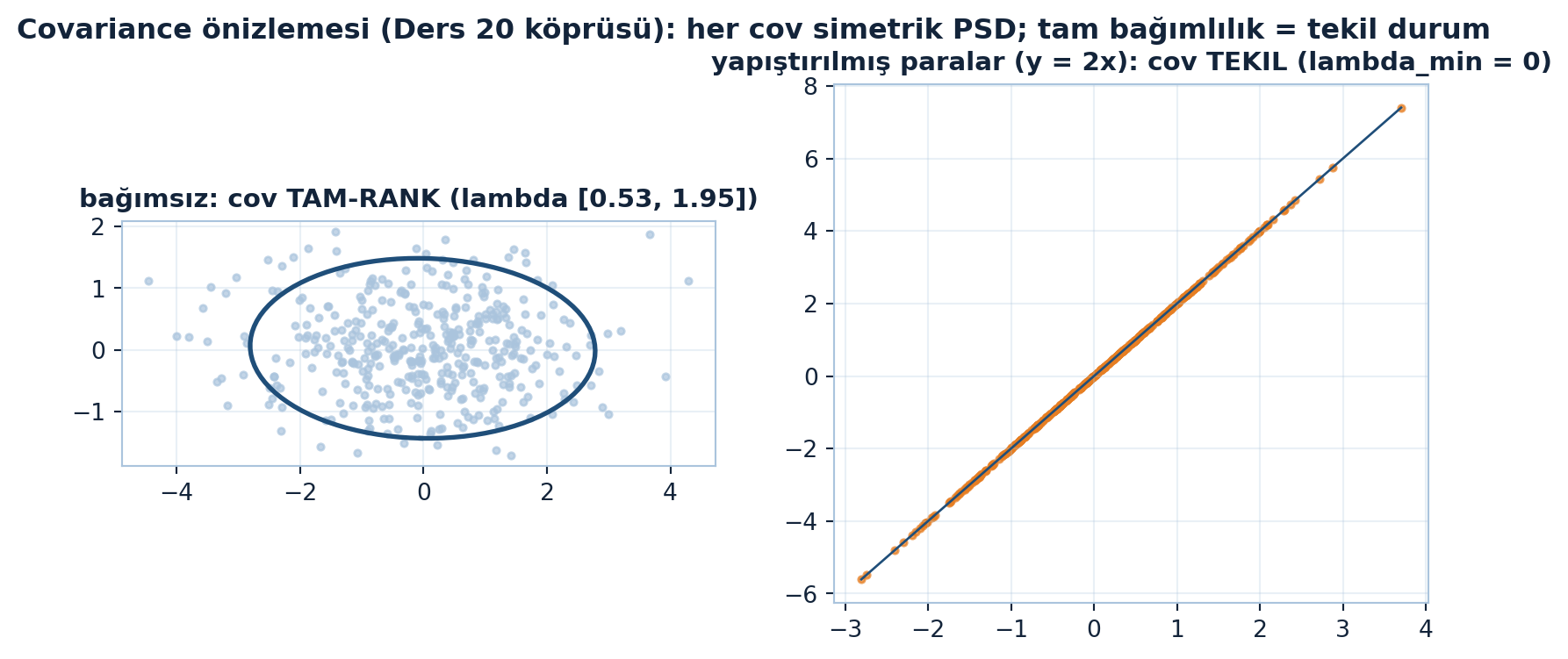
İpucuBuilder Notu — Yapıştırılmış Paralar
Covariance matrisinin pozitif yarı-tanımlı olması, tüm bu lineer cebir bloğunu istatistiğe bağlar: özdeğerleri varyans yönlerini (PCA, Ders 7), pozitif tanımlılığı geçerli bir olasılık yapısını garanti eder. ML köprüsü: Gauss dağılımı, Mahalanobis mesafesi, Kalman filtresi (Ders 14) ve PCA hep covariance matrisinin spektral yapısına dayanır — bir sonraki blok (istatistik → optimizasyon → derin öğrenme) buradan başlar.
20.10 Bu Dersin Özeti
- Eyer = derin öğrenme: yüksek boyutta minimumdan çok eyer var; gradient descent’in eyerlerden kaçışı önemli.
- Rayleigh örneği: \(S = \mathrm{diag}(5,3,1)\) → maks 5 (\(\lambda_{1}\), \(e_{1}\)), min 1 (\(\lambda_{3}\), \(e_{3}\)), eyer 3 (\(\lambda_{2}\), \(e_{2}\)).
- Değerler = özdeğer, yerler = özvektör: Rayleigh’in tüm kritik noktaları özvektör. Uç özdeğerler kolay, ara (eyer) zor.
- Eyer tanımı: gradyan \(\nabla R = 0\) + Hessian belirsiz (karışık işaretli özdeğer).
- Maxmin (Courant-Fischer): \(\lambda_{k} = \max_{\dim V = k} \min_{x\in V} R(x)\). Örnekte $_{2} = $ max-min \(= 3\).
- Interlacing: maxmin’den düşer — \(S\) perturbe/alt-matris olunca özdeğerler \(\lambda_{k}(S) \geq \mu_{k}(S_{n-1}) \geq \lambda_{k+1}(S)\) arasına sıkışır. Weyl de aynı kaynaktan.
- Covariance önizleme: simetrik pozitif (yarı-)tanımlı; yarı-tanımlı = tam bağımlı değişkenler (Ders 20).
ÖnemliTek Bir Cümle
Bir simetrik matrisin aradaki özdeğerleri Rayleigh bölümünün eyer noktalarıdır ve maxmin ilkesiyle ($_{k} = $ boyut-\(k\) alt-uzaylar üzerinde maks, alt-uzay içinde min) maks-min olarak yazılabilir — bu da interlacing teoremini doğrudan kanıtlar.
20.11 Kontrol Soruları
NotSoru 1: S = diag(5, 3, 1) için Rayleigh bölümünün maks, min ve eyer değerleri nedir, hangi vektörlerde
Cevap: Maks = 5, \(x = (1,0,0)\) (\(\lambda_{1}\), \(e_{1}\)); min = 1, \(x = (0,0,1)\) (\(\lambda_{3}\), \(e_{3}\)); eyer = 3, \(x = (0,1,0)\) (\(\lambda_{2}\), \(e_{2}\)). Değerler özdeğerler, yerler özvektörlerdir. Maks tüm ağırlığı en büyük köşegene (5), min en küçüğe (1), eyer ortadakine (3) yükleyince çıkar.
NotSoru 2: Bir kritik noktanın eyer olduğunu Hessian’dan nasıl anlarsın
Cevap: Eyerde gradyan \(\nabla R = 0\) (tüm birinci türevler sıfır) ve Hessian (ikinci türev matrisi, simetrik) belirsizdir — özdeğerleri karışık işaretli. Minimumda Hessian pozitif tanımlı, maksimumda negatif tanımlı; eyerde hem pozitif hem negatif özdeğer var (bazı yönde yukarı, bazı yönde aşağı).
NotSoru 3: Maxmin (Courant-Fischer) ilkesiyle λ₂ nasıl yazılır
Cevap: \(\lambda_{2} = \max_{\dim V = 2} \min_{0\neq x\in V} R(x)\): tüm 2-boyutlu alt-uzaylar \(V\) üzerinde, her \(V\) içinde Rayleigh’in minimumunu al, sonra bu minimumların maksimumunu al. Genel olarak $_{k} = $ boyut-\(k\) alt-uzaylar üzerinde maks, alt-uzay içinde min. Eyer değerini iki kolay işlemin (min sonra maks) bileşimine indirger.
NotSoru 4: Maxmin ilkesi interlacing teoremini neden kolayca verir
Cevap: $_{k} = $ max-min yapısında bir kısıt eklemek (\(S\)’yi perturbe etmek veya bir satır+sütun atmak) alt-uzay seçim havuzunu daraltır/genişletir; bu, maks-min değerini sadece bir adım oynatabilir — ne çok yukarı ne çok aşağı. Sonuç: yeni özdeğerler eski özdeğerlerin arasına sıkışır, \(\lambda_{k}(S) \geq \mu_{k}(S_{n-1}) \geq \lambda_{k+1}(S)\). Weyl eşitsizliği de aynı maxmin makinesinden gelir.
20.12 Egzersizler
Rayleigh kritik noktaları. \(S = \mathrm{diag}(6, 4, 2)\). \(R(x)\)’in maks, min ve eyer değerlerini ve bunlara karşılık gelen vektörleri yaz. Eyer değeri hangi özdeğer? (İpucu: maks 6, min 2, eyer 4 = \(\lambda_{2}\).)
2B minimum. \(S = \mathrm{diag}(6, 4, 2)\), \(V = \mathrm{span}\{e_{1}, e_{3}\}\) (yani \((u, 0, w)\) vektörleri). Bu \(V\) üzerinde \(R\)’nin minimumunu bul. Maxmin yarışında bu \(V\) kazanır mı (\(\lambda_{2} = 4\) için)? (İpucu: \(\mathrm{span}\{e_{1}, e_{3}\}\) min = 2; kazanmaz.)
Maxmin doğrulaması. Egzersiz 2’deki \(S\) için, \(\lambda_{2} = 4\)’ü veren kazanan 2B alt-uzayı bul ve o uzaydaki minimumun 4 olduğunu göster. (İpucu: kazanan \(\mathrm{span}\{e_{1}, e_{2}\}\), min = 4 = \(\lambda_{2}\).)
Minimax dual. Maxmin’in ikizi minimax: \(\lambda_{k} = \min_{\dim V = n-k+1} \max_{x\in V} R(x)\). \(S = \mathrm{diag}(5,3,1)\) için \(\lambda_{2}\)’yi minimax formuyla (3-boyutta \(n-k+1 = 2\) boyutlu uzaylar) hesapla; yine 3 çıktığını doğrula. Minimax ikizinin sayısal kanıtı (Şekil 20.4): 2000 rastgele 2B uzayın TÜM max’ları \(\lambda_{2} = 3\)’ün üstünde (min-of-maxs 3.000012), kazanan \(\mathrm{span}\{q_{2}, q_{3}\}\) tam 3.0.
(Ders 20 habercisi) Bu derste covariance matrisinin simetrik pozitif yarı-tanımlı olduğunu gördük. Peki covariance matrisi tam olarak nasıl tanımlanır? Mean’den sapmaların hangi çarpımı? Ne zaman tekil (yarı-tanımlı) olur? Bir tahmin yaz — Ders 20 “tanımlar ve eşitsizlikler” (covariance, mean, variance) ile istatistik bloğunu açıyor.
20.13 Sonraki Ders İçin Hazırlık
Ders 20: Tanımlar ve Eşitsizlikler (Mean, Variance, Covariance). Lineer cebir bloğu kapandı; istatistik başlıyor. Strang covariance matrisini tanımlar (mean’den sapmaların dış-çarpım ortalaması), pozitif yarı-tanımlılığını kanıtlar ve temel olasılık eşitsizliklerini (Markov, Chebyshev) işler — PCA, Gauss dağılımı ve gradient descent’in (Ders 22+) istatistiksel temeli.
UyarıDers 20 Öncesi Yapılacak
Bu dersin covariance önizlemesini (Şekil 20.7) gözden geçir: bağımsız değişkende cov tam-rank, tam bağımlılıkta (“yapıştırılmış paralar”, \(y = 2x\)) tekil (\(\lambda_{\min} = 0\)). Ders 20 bu PSD yapısını tanımdan kanıtlayacak — lineer cebir bloğunun (özdeğer/SVD/eyer/maxmin) istatistiğe açılan kapısı buradan başlıyor.
20.14 Anahtar Kavramlar (Cheat Sheet)
| Kavram | Formül / Fikir | Strang (dk) |
|---|---|---|
| Eyer = derin öğrenme | gradient descent eyerden kaçış (Ders 22) | 1m00 |
| Rayleigh örneği | \(S = \mathrm{diag}(5,3,1)\): maks 5, min 1, eyer 3 | 4m05 |
| Değerler = özdeğer | kritik noktalar özvektör, değerler özdeğer | 7m38 |
| Eyer tanımı | \(\nabla R = 0\) + Hessian belirsiz | 8m10 |
| Maxmin (Courant-Fischer) | \(\lambda_{k} = \max_{\dim V=k} \min_{x\in V} R(x)\) | 10m38 |
| Örnek \(\lambda_{2} = 3\) | \(\mathrm{span}\{e_{1},e_{2}\}\) min = 3 = maks-min | 12m08 |
| Maxmin → interlacing | \(\lambda_{k}(S) \geq \mu_{k}(S_{n-1}) \geq \lambda_{k+1}(S)\) | 11m31 |
| Covariance önizleme | simetrik pozitif (yarı-)tanımlı | 51m36 |
20.15 ML Bağlantıları Özeti
- Eyer geometrisi: derin ağ kayıp yüzeyinde minimumdan çok eyer; SGD gürültüsü (Ders 25) ve negatif eğrilik yönleri eyerden kaçışı sağlar.
- Maxmin / minimax: GAN (üretici-ayırıcı), adversarial/robust eğitim hep min-maks dengesi; Courant-Fischer bu yapının spektral kökeni.
- Spektral graf / GCN (NYU paralel ders): graf Laplacian özdeğerleri maxmin ile tanımlanır; \(\lambda_{2}\) (Fiedler değeri) graf bölme ve spektral kümelemenin (Ders 35) anahtarı; interlacing graf değişiminde spektrum kararlılığını sınırlar.
- PCA köprüsü: maxmin “en iyi \(k\)-boyutlu alt-uzay” karakterizasyonu = Eckart-Young’ın (Ders 7) özdeğer ikizi; spektral gömme aynı iskelet.
- İkinci-derece optimizasyon: Hessian özdeğer işaretleri (eyer mi minimum mu) Newton ve eyer-kaçış yöntemlerinin temeli (Ders 18 pivot/atalet).
- Covariance → istatistik bloğu: pozitif yarı-tanımlı covariance (Ders 20), Gauss dağılımı, Kalman filtresi (Ders 14), PCA — sıradaki blok buradan başlar.
- Geriye köprü: Ders 18 (Rayleigh, eyer, KKT), Ders 15 (interlacing), Ders 16 (Weyl), Ders 7 (Eckart-Young), Ders 5 (pozitif tanımlı).
ÖnemliMaks-Min Eyeri Çözer, İnterlacing’i Armağan Eder
“…write it as the maximum of a minimum.” — Strang, 10:38 — Eyer noktası, doğru alt-uzay seçildiğinde bir maks-min’e dönüşür; bu ilke ara özdeğerleri tanımlar, interlacing’i kanıtlar ve spektral graf yöntemlerinin kapısını açar.